
ABAQUS汽车控制臂的拓扑优化
2017-08-18 by:CAE仿真在线 来源:互联网
优化目标:
-
使用ABAQUS优化模块通过在最大化其刚度的同时减小控制臂的体积来优化汽车控制臂的设计。
应用说明:
-
汽车控制臂的拓扑优化。 在拓扑优化过程中,修改设计区域中单元的材料属性(有效地从Abaqus分析中除去单元或添加单元),直到达到最佳解。
几何模型:
-
汽车控制臂模型是二次四面体(C3D10)单元进行孤立网格划分。 控制臂关于X-Y平面对称,仅研究了模型的一半。优化前如图1、2所示:

图1

图2
材料属性:
-
控制臂由杨氏模量为210GPa,泊松比为0.3的弹性材料制成。
边界条件与荷载:
-
模型的中心被约束为关于Y-Z平面对称。 控制臂的左上端和右上端位于设计区域的外侧,并以所有三个平移自由度固定。 下轴承中心也在设计区域之外,其平移沿z方向约束。下轴承的中心节点在x方向加载70000 N的集中力,在y方向装载-70000 N。
优化特征:
-
优化任务:
创建由基于条件的优化算法控制的拓扑优化任务。
-
设计区:
模型的设计区域是优化过程中要修改的区域,如图3所示。某些区域被排除在设计区域之外,因为它们是固定装置所需要的,并且用于施加载荷。从设计区域排除的单元的材料属性保持不变。

图3
-
设计响应:
创建一个设计响应,计算设计区域中所有单元上的应变能的总和。第二个设计响应计算设计区域的体积。
-
目标函数:
目标函数定义了优化的目标。在该示例中,单个目标函数目的是使设计区域的应变能的总和最小化。由于柔度被定义为应变能的总和,刚度是柔度的倒数,因此目标函数等效于最大化设计区域的刚度。
-
约束:
优化约束约束整个拓扑优化过程。约束必须允许优化达到既可行又可接受的解决方案。在此示例中,创建了一个约束,该约束指定优化模型应包含原始控制臂初始体积的57%。
-
几何限制:
-
定义几何限制来进一步限制拓扑优化过程,以确保为可使用标准技术(如铸造或锻造)制造的设计,如图4所示。
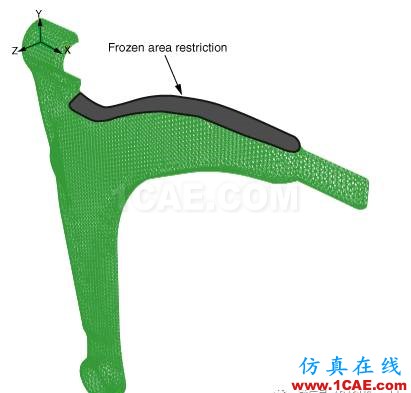
图4
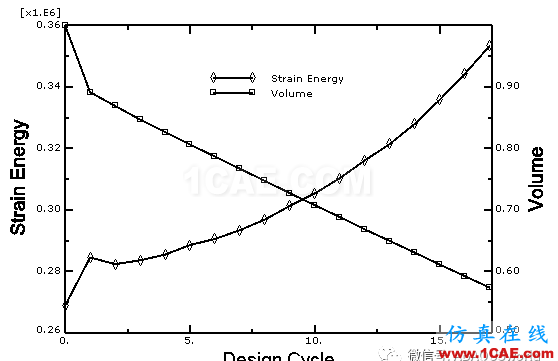
优化结果:

相关标签搜索:ABAQUS汽车控制臂的拓扑优化 abaqus分析培训 abaqus技术教程 abaqus岩土分析 钢筋混凝土仿真 abaqus分析理论 abaqus软件下载 abaqus umat用户子程序编程 Abaqus代做 Abaqus基础知识 Fluent、CFX流体分析 HFSS电磁分析 Ansys培训




