
基于ANSYSWORKBENCH的空间曲线啮合齿轮接触分析
2016-10-21 by:CAE仿真在线 来源:互联网
空间曲线啮合齿轮是近几年来华南理工大学教授陈扬枝提出的新型齿轮,对该齿轮的弯曲应力和强度设计准则都有了一定的研究。因此,本文主要是利用ANSYS WORKBENCH软件来对该齿轮来进行接触分析的进行探讨,介绍了接触分析的方法,为空间曲线啮合齿轮提供了一种新的分析方法。用两个初始参数几乎完全一样的两个齿轮对来进行比较分析,得到交错轴齿轮比交叉轴齿轮的等效应力更大;安装位置对分析的结果的影响也很大;等效应变和变形都能够满足我们实际的需求等这些结论。
1 引言
传统的齿轮的形式多种多样,用有限元对传统齿轮的机构进行分析是目前研究采用得最多的一种方法。而齿轮啮合过程作为一种接触行为,因涉及接触状态的改变而成为一个复杂的非线性问题。因此近年来,国内外学者开始采用接触有限元法对齿轮进行分析。接触有限元法来分析齿轮结构,为齿轮的快速设计和进一步的优化设计提供条件。
空间曲线啮合齿轮(Space Curve Meshing Wheel, SCMW) 是近几年来由华南理工大学教授陈扬枝提出的新型齿轮,而空间曲线啮合交错轴齿轮则是可以运用于空间交错轴上的啮合齿轮。不同于基于齿面啮合理论的传统齿轮机构,它们是基于一对空间共轭曲线的点啮合理论。它的特点是:传动比大、小尺寸、质量轻等。课题组前期已经研究了适用于该空间曲线啮合轮机构的空间曲线啮合方程,重合度计算公,强度设计准则以及制造技术等,并设计出微小减速器。同时,对于该齿轮的等强度设计等方面正在进行研究。
ANSYS WORKBENCH是用ANSYS 求解实际问题的产品,它是专门从事于模型分析的有限元软件,能很好地和现有的CAD三维软件无缝接口,来对模型进行静力学、动力学和非线性分析等功能。由于空间曲线啮合齿轮主要运用于微小型或者是微型机械装置中,传递的力非常的小,主要用来传递运动,因此,点蚀和磨损都不是它的主要失效形式。本文主要是用ANSYS WORKBENCH对该齿轮进行接触分析,来探讨整个机构在此情况下的应力状态。
2空间曲线啮合齿轮的建模
空间曲线啮合齿轮,包括主动轮、从动轮、主动钩杆和从动钩杆,主动钩杆均匀布置在主动轮圆柱体上底面的圆周上,从动钩杆均匀布置在从动轮圆柱体的圆周上,主动轮和从动轮组成一对传动副。
由前面的研究可以得知,空间曲线啮合齿轮主要是先创建出两共轭的主、从动接触线分别;然后以接触线为导线,以圆为母线来建立主、从动钩杆,从而得到空间曲线啮合齿轮。本论文将讨论两个例子,一个是两轴为同平面的垂直齿轮对,另一个是两轴在不同平面的交错垂直齿轮对。
2.1 两轴为同平面的垂直齿轮对
它的基本设计参数如下:

,

,

,

,

,

,

,即可以得到它的主动接触线为:
而从动接触线的方程为:

则在proe软件上建立得到接触线,并以半径为0.6的圆为母线进行建模和装配仿真,则可以得到空间曲线啮合交错轴齿轮的图形如下图1所示:

图1 两轴同平面的垂直齿轮对
2.2 两轴在不同平面的交错垂直齿轮对
它的基本设计参数如下:
,
,
,

,
,
,
即可以得到它的主动接触线为:

而从动接触线的方程为:
则在proe软件上建立得到接触线,并以半径为0.6的圆为母线进行建模和装配仿真,则可以得到空间曲线啮合交错轴齿轮的图形如下图2所示:
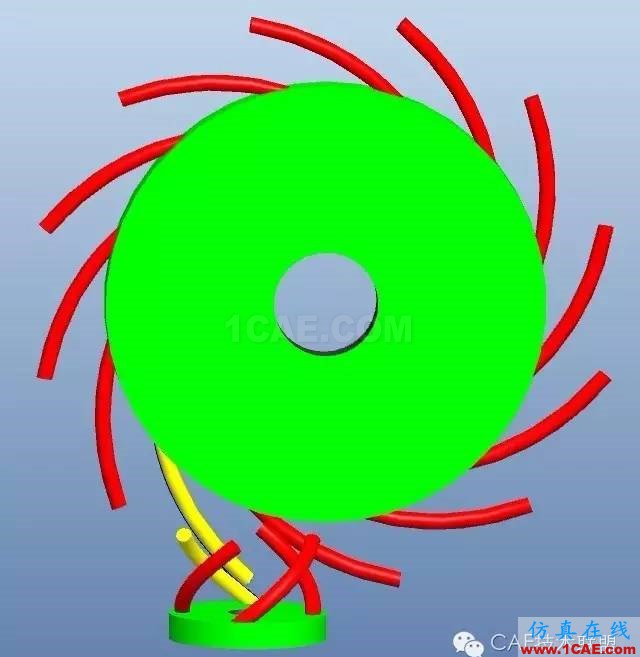
图2两轴在不同平面的交错垂直齿轮对
3在ANSYS WORKBENCH上的接触分析
ANSYS WORKBENCH[13~15]能与PROE无缝连接,点击进入后得到的界面为图3所示。由此可以在左边的Static Structural静力学分析工具拖入到A工具栏的右边框架上,并让A中的A2栏Geometry与B2栏中的Geometry进行连接,则在静力学分析中已经导入了ANSYS WORKBENCH分析软件,可进行分析,其界面如图4所示。由此则可进行下面的材料定义,接触对建立,划分网格,约束和加载和最后的后处理等一系列的工作,具体如下文所示。
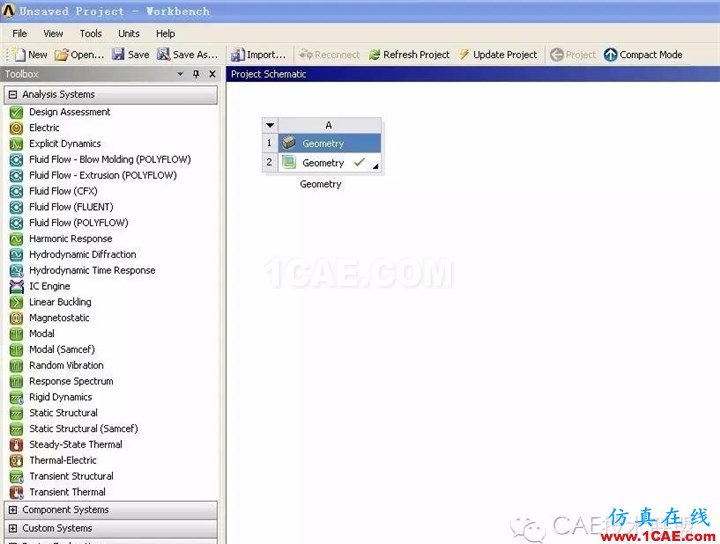
图3 ANSYS WORKBENCH 界面
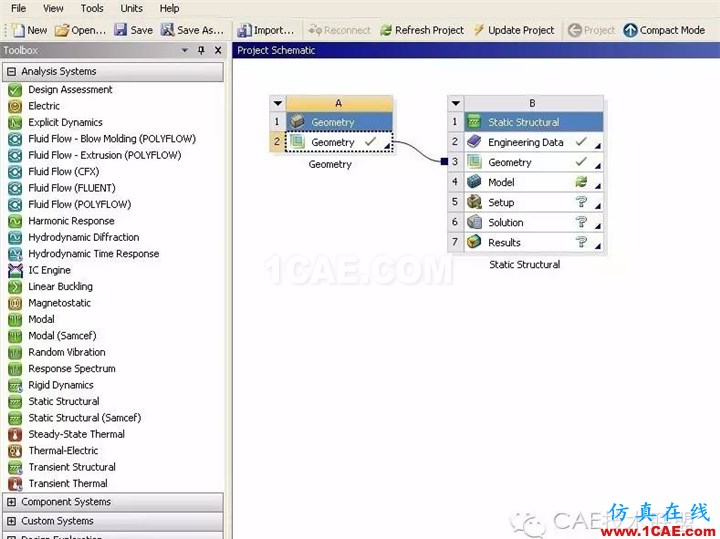
图4 静力学分析的导入
(1)材料属性
一般情况下,空间曲线啮合齿轮都是由快速成型的加工方法加工出来的,而且采用的材料为316L不锈钢,故可以添加不锈钢的作为这两个例子分析的材料。双击B2中的Engineering Data则可以进入材料属性的编辑和定义,其界面如下图5所示。选择图中的Outline of General Materials里面的Stainless Steel材料进行添加。然后可以定义Stainless Steel材料的属性,由于选择的是不锈钢,而我们实际上用到的是316L不锈钢,他们的材料属性有些不同,所以可以对其进行材料的设置。设置后的结果如下图6所示.
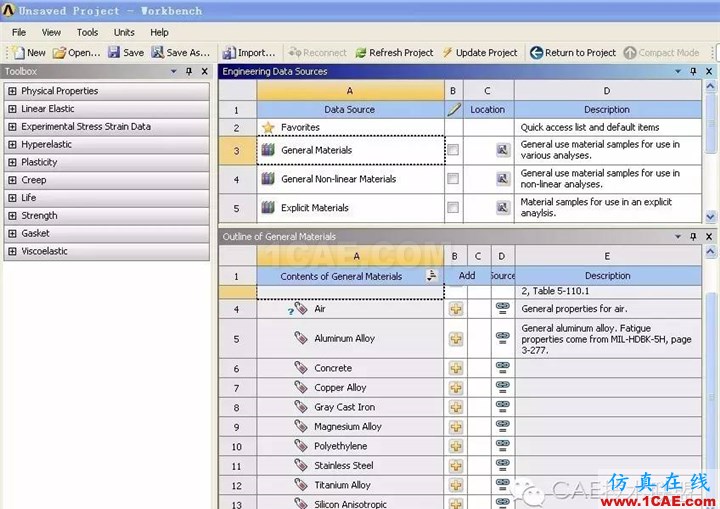
图5 添加材料

图6 材料属性设置
自此,材料添加和材料属性的定义已经完成,点Return Project即可返回主页面。双击B3的Model,进入到Static Structural界面(如图7所示),在树形的左边Geometry里面的没一个模型进行材料的添加,使得模型前面的“?”变成“√”则材料添加全部完成。
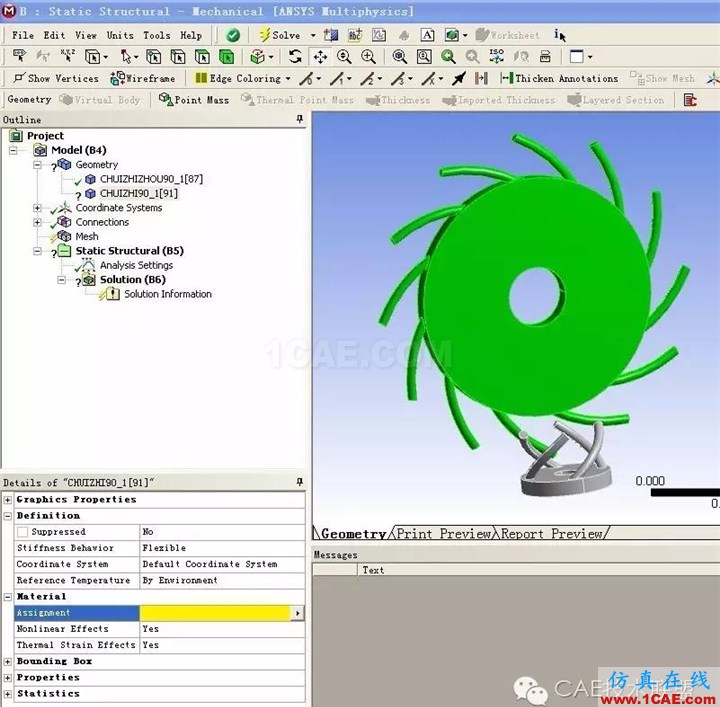
图7 Static Structural界面
(2)接触对建立
接触对,是接触分析的一个特点,在做接触分析之前,需要判断模型在变形期间哪些地方可能发生接触,并通过目标 和接触单元来分别定义他们。ANSYS WORKBENCH 支持三种接触方式:点—点,点—面,面—面,每种接触方式使用的接触单元适用于某类问题。用ANSYS WORKBENCH的一个好处是设置两对接触对是自动生成的,当然你也可以根据需要来重新设置,本两个例子都不需要重新设置,其接触对如下图8所示。
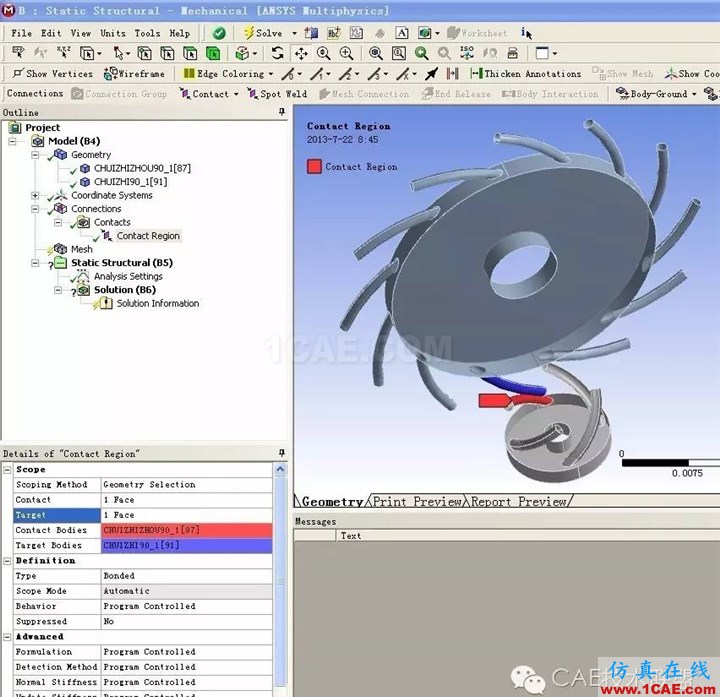
图8 接触对建立和设置
(3)生成网格
一般来讲,网格数量增加,计算精度会有所提高,但计算规模也会有所增加。由于本例中的齿轮尺寸本身就相对偏小,因此在ANSYS WORKBENCH 中Sizing的Smooting选择Low,Element Size设置为0.0003,其他选择默认来进行划分网格。点Solve后系统会自动进行网格划分,得到的网格图如下图9所示:
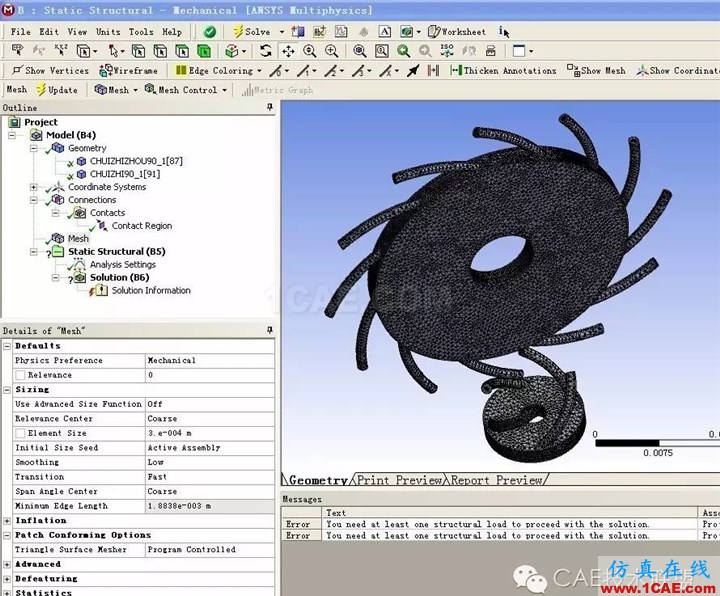
图9 网格划分
(4)约束及加载
在正常工作时,该新型齿轮和传统齿轮一样,主动轮具有角速度,受驱动力矩的作用,从动轮具有角速度,受阻力距的作用。在静态分析中,假设主动轮和从动轮啮合的瞬间,从动轮是不动的,则可只考虑主动轮的驱动力矩,而从动轮则约束其所有自由度。
因此,本例中的约束可以进行两个设置,一个是采用Fixed Support 来进行进行对从动轮的中心进行约束,选择从动轮的轮孔,选择Apply即可完成约束,其图如下图10所示。而对主动轮的约束,则采用Cylindrical Support来进行,选择主动轮的轮孔,选择Apply,并将Tangential定义为Free,则可以完成主动轮的约束设置。
对本例的加载,在Loads中选择Moment来进行,选择主动轮的轮孔来进行作为Geometry设置,由于该空间曲线啮合齿轮应用于微小型或者是微型传动系统中,所以它传递的力相对比较小,本例则定义其受到的扭矩为1Nm,得到的结果如下图11所示。选择Solve后,则定义完成。可以进行下面的后处理工作
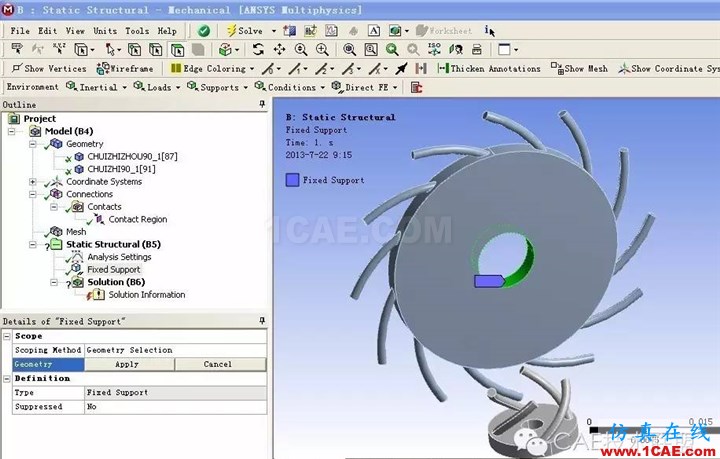
图10 模型约束的设置
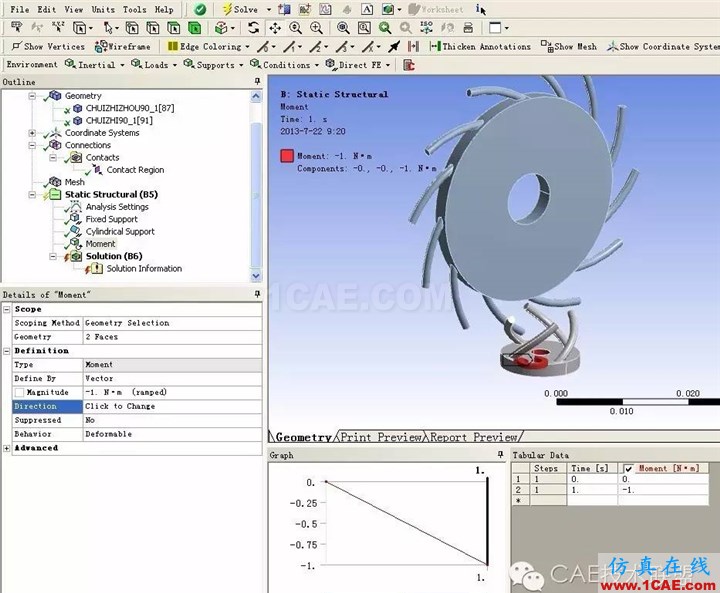
图11 模型载荷的设置
(5)后处理
在solution命令中选取了Equivalent Stress、Equivalent Elastic strain和Total Deformation这几个后处理的结果,进行Solve求解后可以得到他们的等效应力、等效应变和变形的图像。
由于进行的是接触分析,可以对其进行接触应力的结果导入,选择Contact Tool 工具,然后在其上面添加Status、Pressure和Sliding Distance这机构结果的导入,同时选择Worksheer作为Scoping Method,如下图12所示的设置界面,之后选择Solve则可以进行接触应力等结果的计算,并且得到结果。
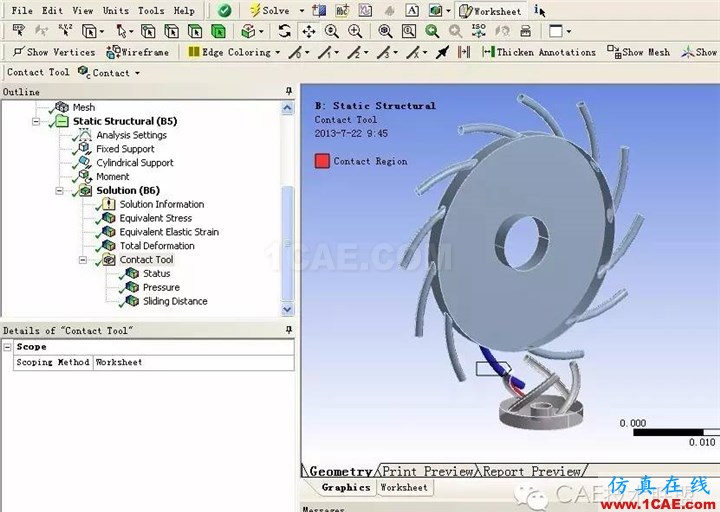
图12 后处理界面
4结果分析与处理
由上面ANSYS WORKBENCH 的接触分析方法,可以得到两个例子的等效应力(图13、14)、等效应变(图15、16)和变形(图17、18)的图像分别如下图所示,同时也可以得到接触的结构(图19、20)、接触应力(图21、22)、接触滑动率(图23、24)的分析结果如如下图所示。
由两个例子的参数来进行比较可以知道,除了空间交错垂直齿轮对在y方向上平移了一个距离6以外,其他数据基本上是一样的,而且由这些参数建立出来的齿轮对的尺寸大小几乎也是一样的,ANSYS WORKBENCH中的接触分析方法的参数也是一样的,可是得到的两组图却不是一样的。由这些图可以得到下列结论:
(1) 齿轮对的最大应力主要集中在齿根部分,这同用ANSYA 直接进行分析得到的结果是应用的,并在传动力矩相对比较小的时候,齿轮可以满足强度的要求。
(2) 这两个齿轮对的等效应变和变形都比较小,符合所需要的要求。
(3) 空间交错垂直齿轮对得到的分析结果比平面垂直齿轮对的分析结果要大一些,这主要的原因是空间交错垂直齿轮对的多一个参数之后可能会导致装配时接触上的干涉。
(4) 齿轮对在接触分析中对齿轮的装配要求挺高的,不同的装配位置,得到的分析结果会是不一样的。图14中的最大等效应力集中在从动轮开始部分的接触位置,就是由于那里的接触过多,理论上本齿轮的接触是点——点的接触方式,但是由于ANSYS WORKBENCH无法选择上两接触线进行接触对的定义,从而导致接触面积相对比较大,这也就造成了接触应力和等效应力在该点处过于大的原因。
(5) 由两个例子的接触结构图可以看出来,在接触线的位置的接触值为Sticking,而远离两接触线位置的接触值就会很小,为Far。
(6) 两齿轮对的接触滑动率都相对比较小。
(7) 两齿轮对的接触应力相对比较大。
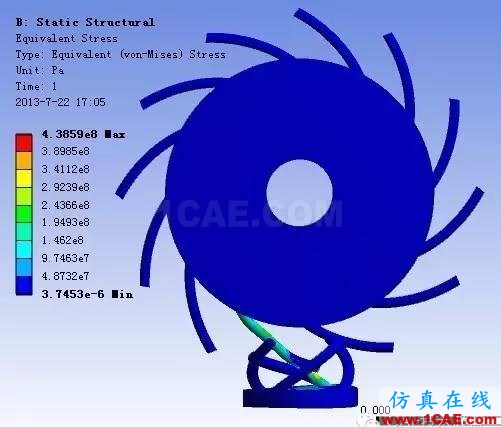
图13 平面垂直齿轮对的等效应力图
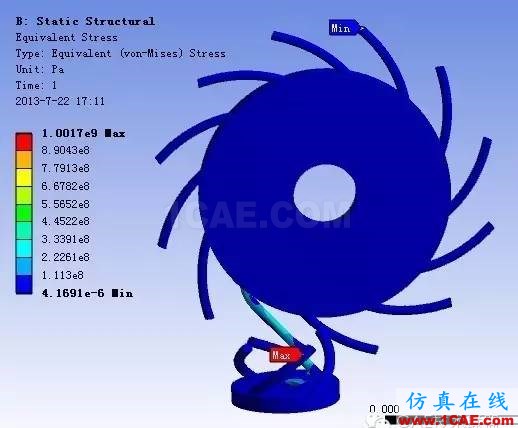
图14 空间交错垂直齿轮对的等效应力图

图15 平面垂直齿轮对的等效应变图
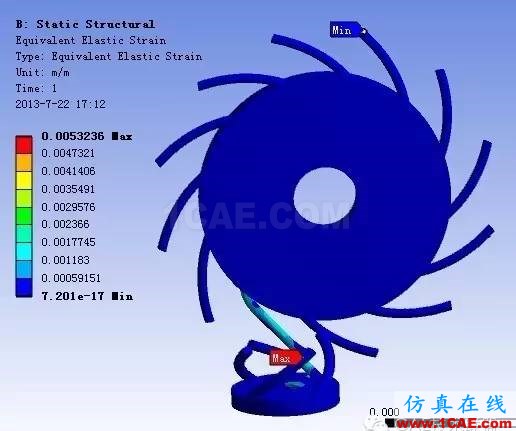
图16 空间交错垂直齿轮对的等效应变图
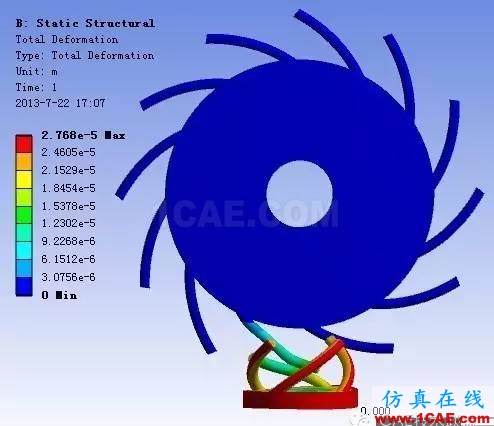
图17 平面垂直齿轮对的变形图
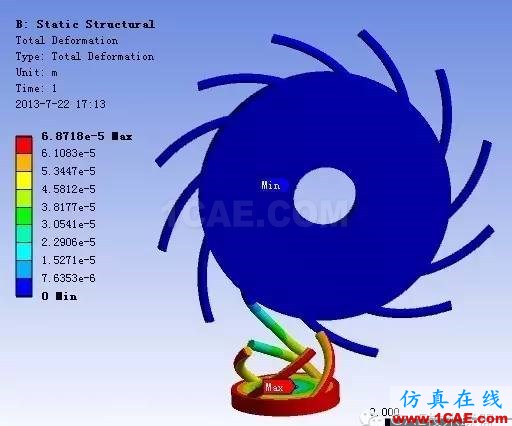
图18 空间交错垂直齿轮对的变形图

图19 平面垂直齿轮对的接触结构图

图20 空间交错垂直齿轮对的接触结构图

图21 平面垂直齿轮对的接触应力图

图22 空间交错垂直齿轮对的接触应力图

图23 平面垂直齿轮对的接触滑动率图

图24 空间交错垂直齿轮对的接触滑动率图
5 结论
本文主要是利用ANSYS WORKBENCH软件来对空间曲线啮合齿轮来进行接触分析的探讨,介绍了接触分析的方法,为空间曲线啮合齿轮提供了一种新的分析方法。与课题组前面直接用单个齿轮进行受力分析,得到的结果基本上是一致的,但这个过程更加方便,快捷,同时能够计算出接触应力及其接触滑动率等所需要的分析结果。用两个初始参数几乎完全一样的两个齿轮对来进行比较分析,可得到交错轴齿轮比交叉轴齿轮的等效应力更大;安装位置对分析的结果的影响也很大;等效应变和变形都能够满足我们实际的需求这些结论。对于我们空间曲线啮合齿轮今后的进一步研究提供更加重要的依据。
相关标签搜索:基于ANSYSWORKBENCH的空间曲线啮合齿轮接触分析 Ansys有限元培训 Ansys workbench培训 ansys视频教程 ansys workbench教程 ansys APDL经典教程 ansys资料下载 ansys技术咨询 ansys基础知识 ansys代做 Fluent、CFX流体分析 HFSS电磁分析 Abaqus培训




