
行业应用 | 机器人及数控机床研发中的仿真技术应用
2018-03-09 by:CAE仿真在线 来源:互联网
以机器人及数控机床为主体的智能装备行业研发涉及的研发问题众多,从物理学的角度来讲,智能装备研发涉及的学科领域如下图所示:
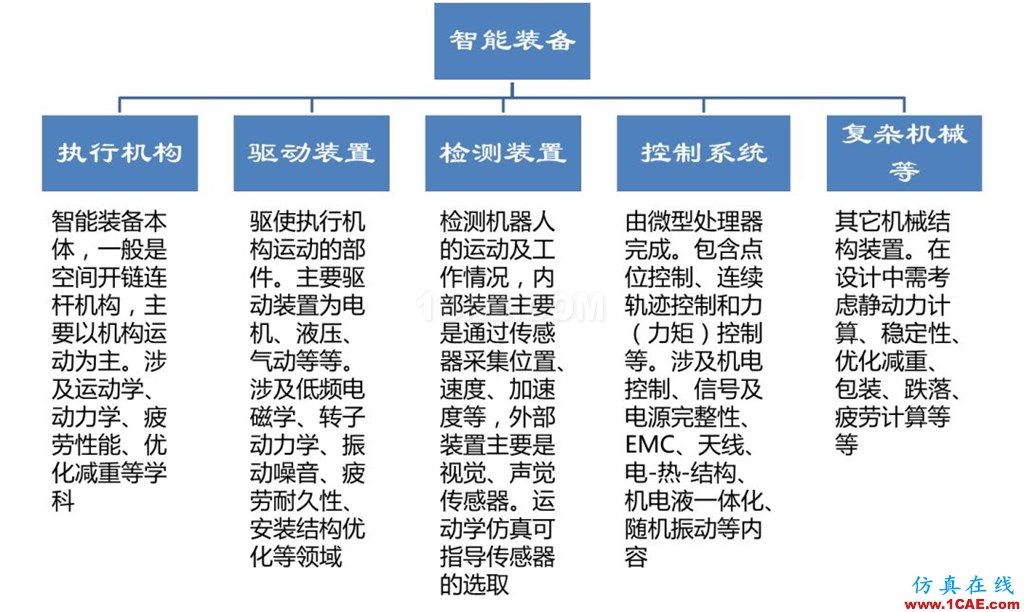
通过仿真可以在设计前期发现产品问题,并提供改进方向。整体来说,智能装备行业的主要CAE问题包括:
-
静力学分析:整体结构及零部件的强度、刚度、稳定性等分析等;
-
动力学分析:结构的振动频率、噪音、随机振动、转子动力学等
-
机构运动分析:机构的运动轨迹、速度、加速度、关节力计算等
-
低频电磁场分析:电路级和系统级的机电控制的仿真和优化等
-
高频电磁场分析:PCB板级和设备级的信号完整性、电源完整性和电磁兼容分析等
-
疲劳分析:反复受力部件的疲劳性能及耐久性计算等
-
优化分析:结构的拓扑形状及尺寸优化减重等
-
复合材料分析:复合材料的铺层强度计算、铺层优化等
-
跌落碰撞分析:包装可靠性、碰撞、跌倒、跌落研究等等
-
多物理场分析:电子设备的电热结构耦合、机电液一体化(子)系统级运动分析等
机床解决方案
机床行业 7 大关键技术:(1)全柔性的滚珠丝杆模型(2)全柔性的线性滑轨模型(3)切削力的便捷定义(4)响应分析(FRA)(5)机床颤振分析(6)机床零部件疲劳耐久分析(7)机 - 电 - 控一体耦合技术
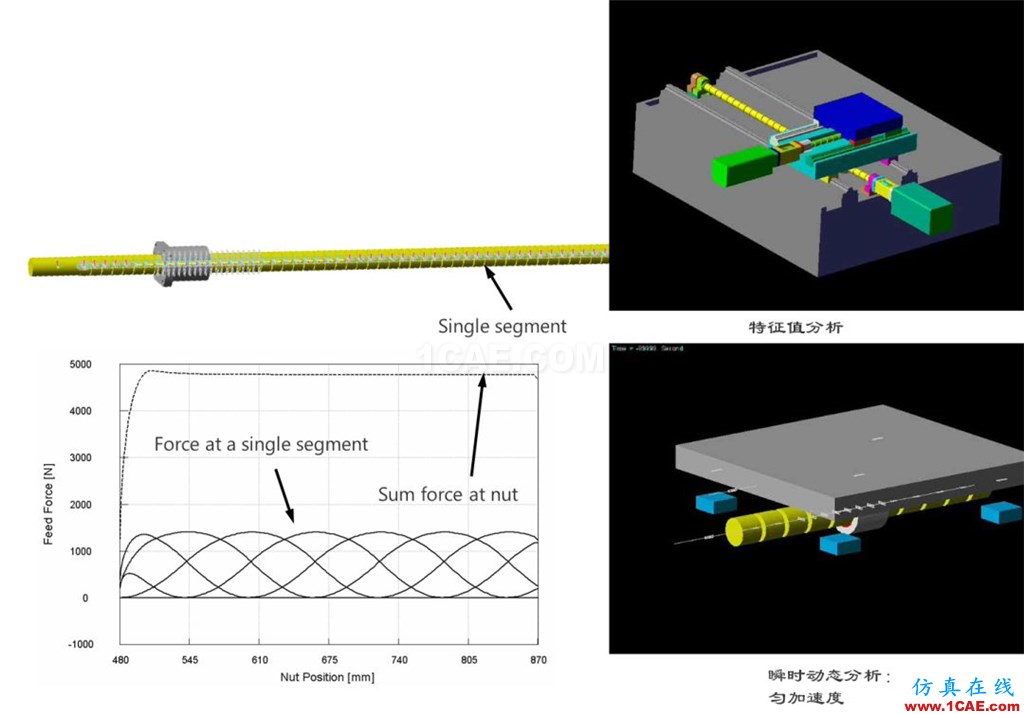
(1)全柔性的滚珠丝杆模型
-
自动将力和力矩从一个单元“移交”到下一个单元
-
类似运行用户子程序
-
RecurDyn定义力单元:矩阵力
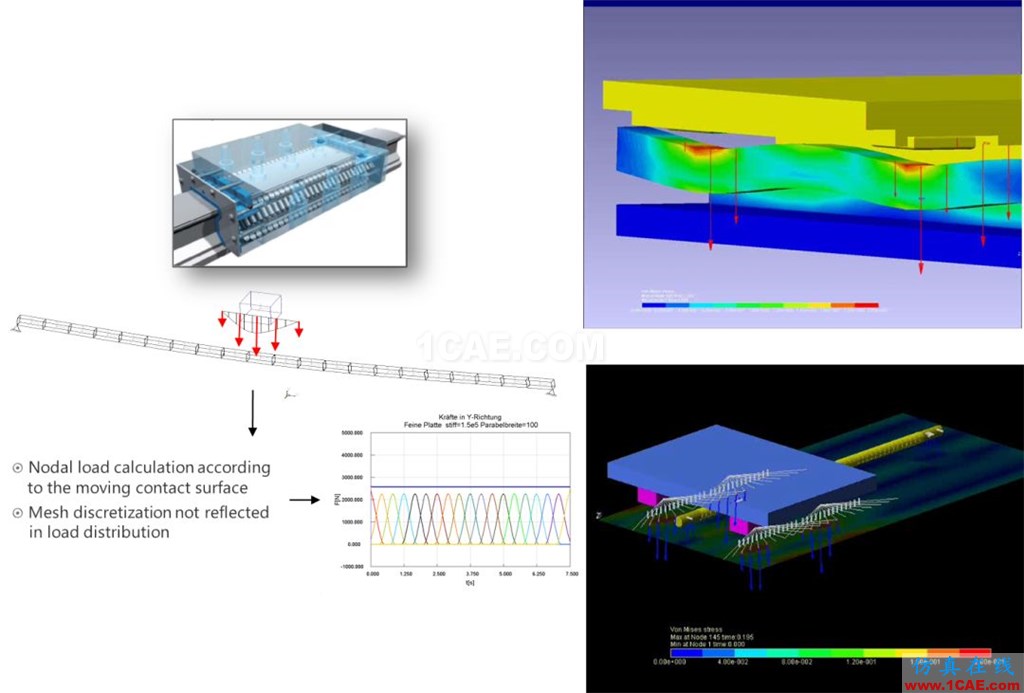
(2)全柔性的线性滑轨模型
-
自动将荷载用抛物线分布方式传递到滑轨节点上,并自动修正刚度
-
RecurDyn MachineTool根据用户定义的参数(如导轨的刚度,几何尺寸……)自动创建力矩阵单元
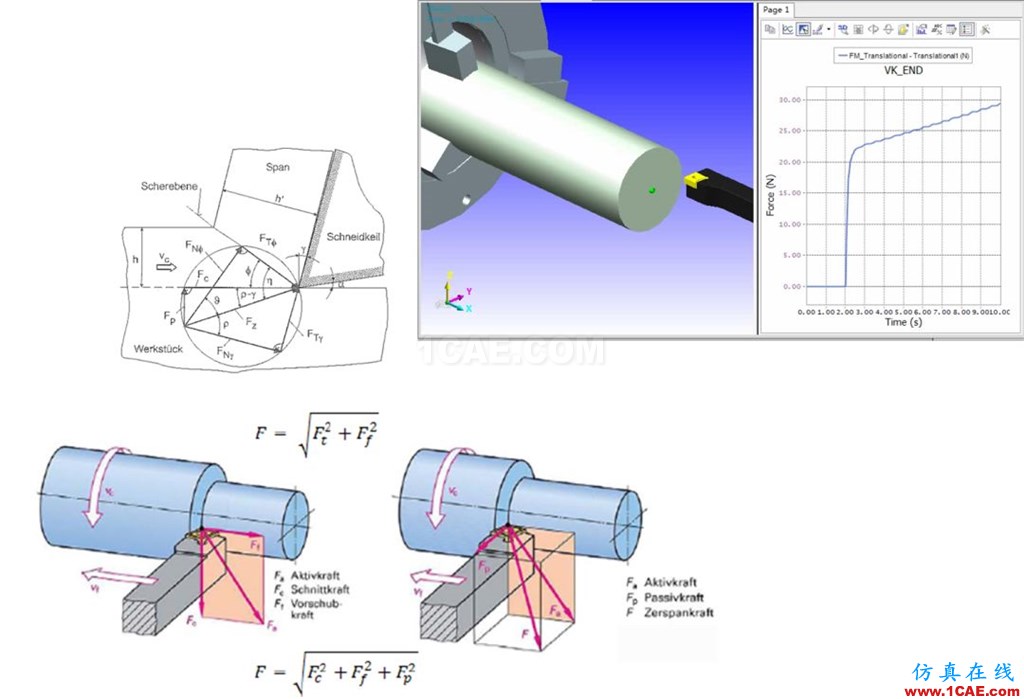
(3)切削力的便捷定义
(4)响应分析(FRA)
-
通过不同的振动激励(如冲击锤、激振器等)测试机床的结构特性
-
目标改进机床的传递特性,优化机床的性能
-
RecurDyn验证
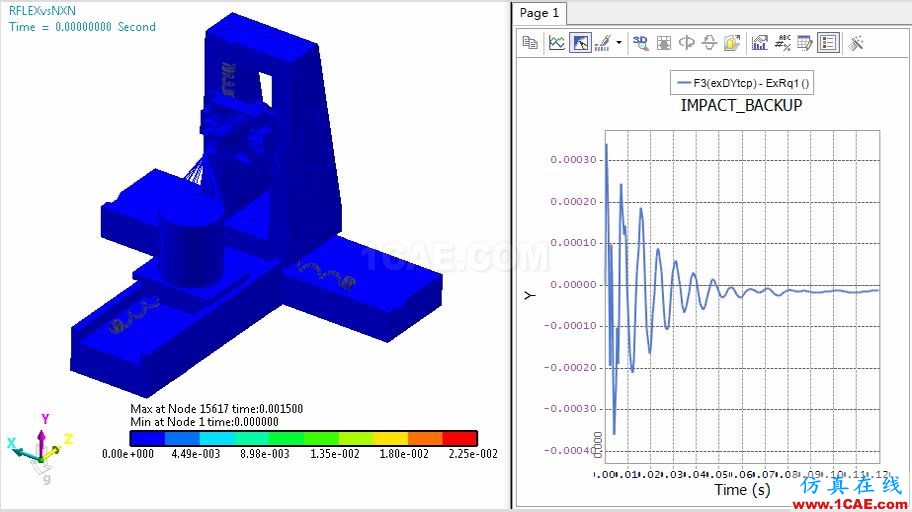
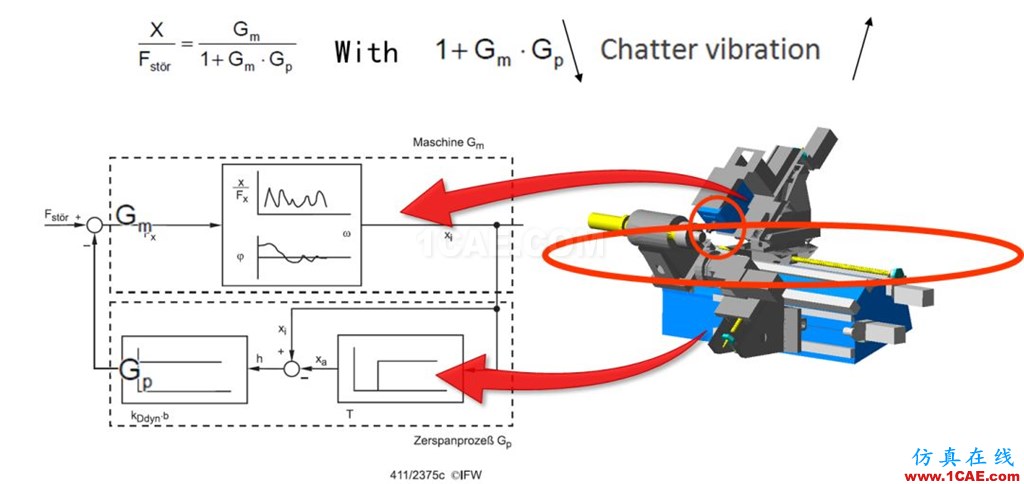
(5)机床颤振分析
-
由机床零部件相互作用的动态行为和切削作用的动态行为引起
-
稳定性判定根据Nyquist标准建立
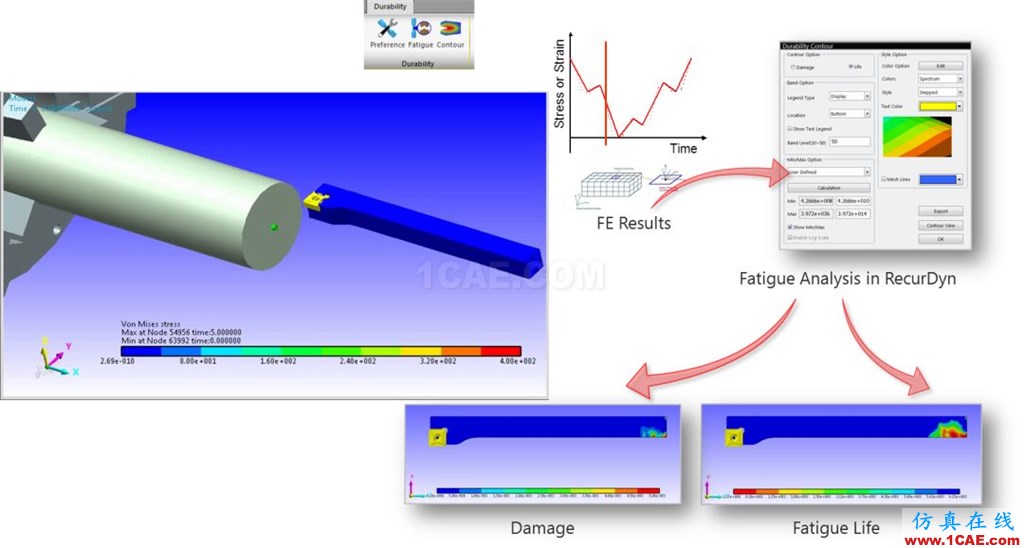
(6)机床零部件疲劳耐久分析
-
系统级的疲劳耐久测试
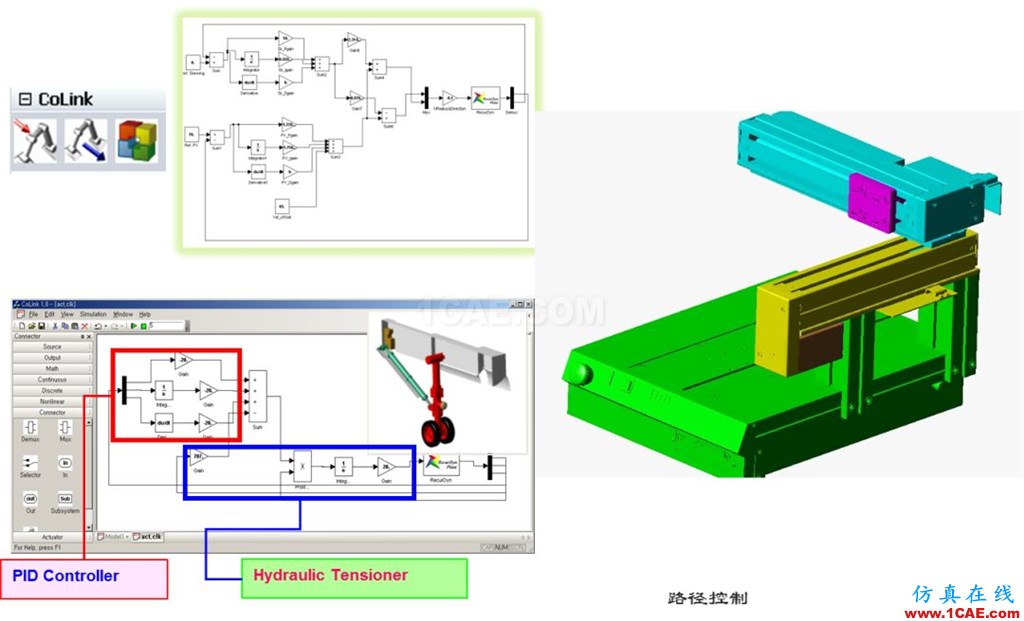
(7)机 - 电 - 控一体耦合技术
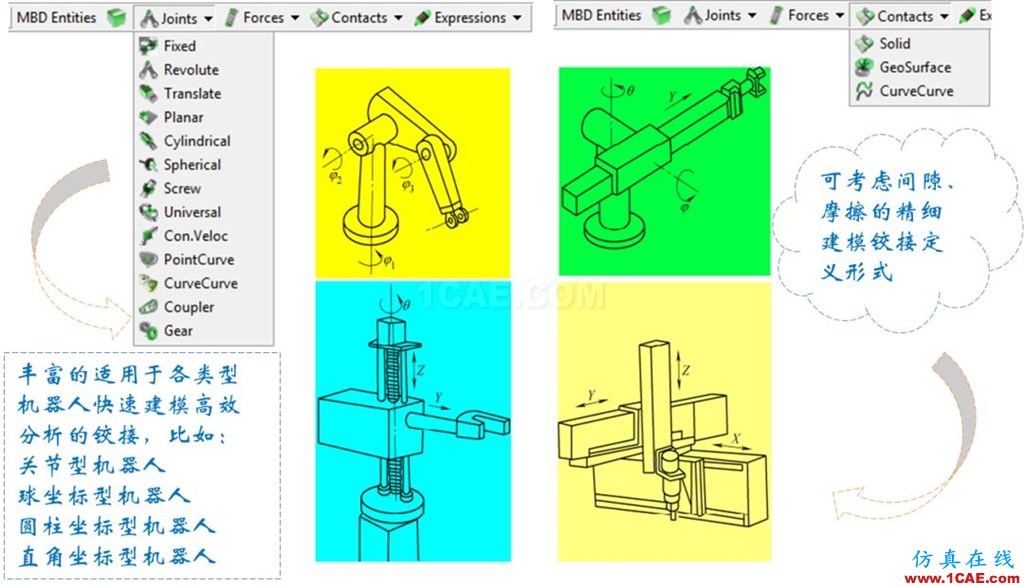
机器人解决方案
-
验证机器人的运动功能
-
验证机器人的受力和刚强度
-
验证机器人传动系统
-
验证驱动方式和控制逻辑
-
验证机器人在作业环境的能力
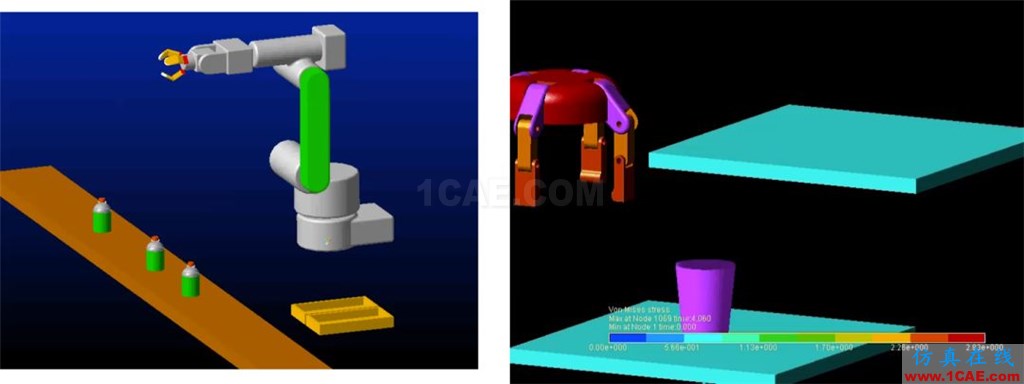
(1)机器人动刚度及夹持力
-
手臂的结构和尺寸应满足机器人完成作业任务提出的工作空间要求;
-
减小驱动装置的负荷,提高手臂运动的响应速度提高运动的精确性和运动刚度。
-
验证手腕回转各关节轴上要设置限位开关和机械挡块能否防止关节超限造成事故?
验证:
-
末端执行器是否能完成夹持任务?
-
末端执行器对夹持物的加持力是否会造成受损?
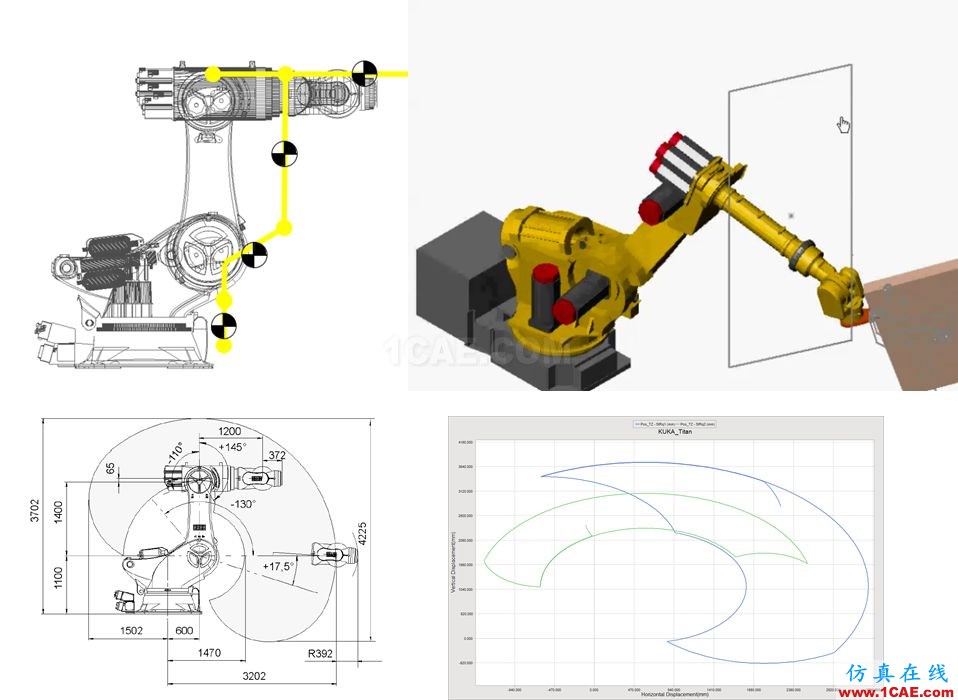
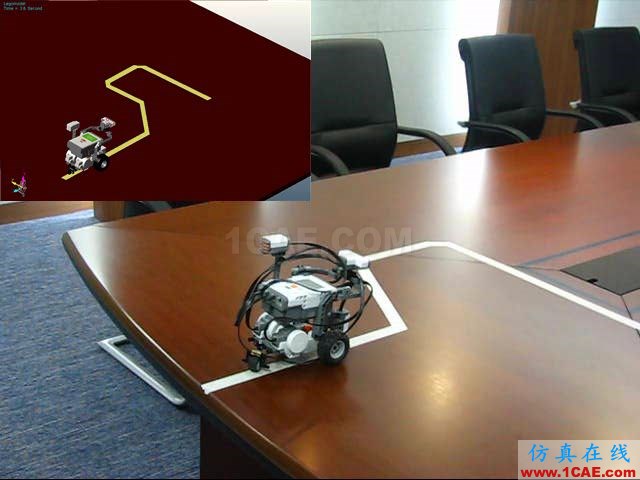
(2)机器人的运动功能
-
根据作业运动功能的要求,确定机器人末端执行器应达到的位置轨迹线和姿态
-
给出各关节运动量,求出机器人的实际工作空间及姿态
-
分析构件的速度和加速度
-
末端执行器上所夹持的工件角速度分析
验证:
-
作业空间
-
作业路径
-
速度
-
加速度
-
关节Torque
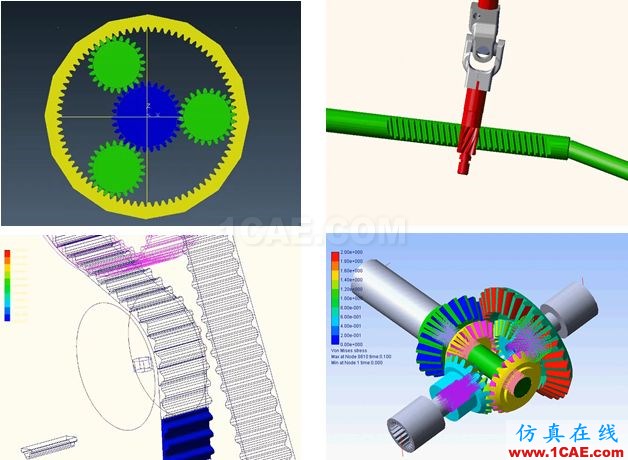
(3)机器人传动系统
机器人操作机是由若干个构件和关节组成的多自由度空间机构,其运动都是由驱动器经各种机械传动装置减速后驱动负载。数字样机技术可以验证机器人中常用的机械传动机构的传动性能:
-
有齿轮传动、蜗杆传动、滚珠丝杠传动、同步齿形带传动、链传动、行星齿轮传动等
-
钢带传动装置
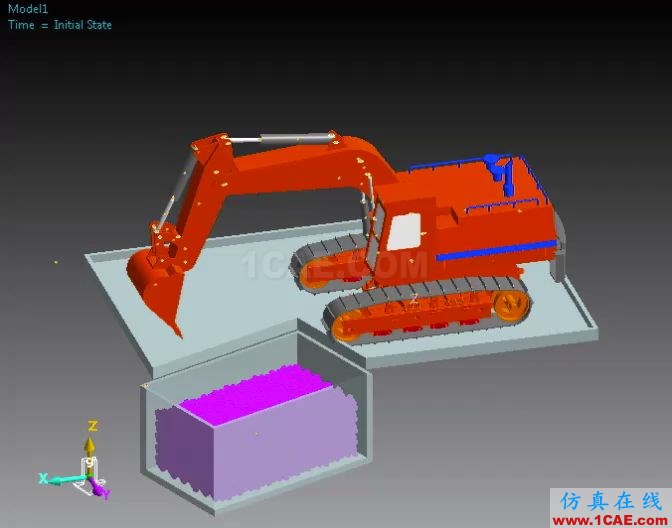
(4)执行机构作业过程的能力验证
工业机器人是一种生产设备,作业时一般需要有外围设备完成一些辅助工作。单机形式工作的工业机器人如去铸件飞边、刮研、切削加工、焊接等机器人。
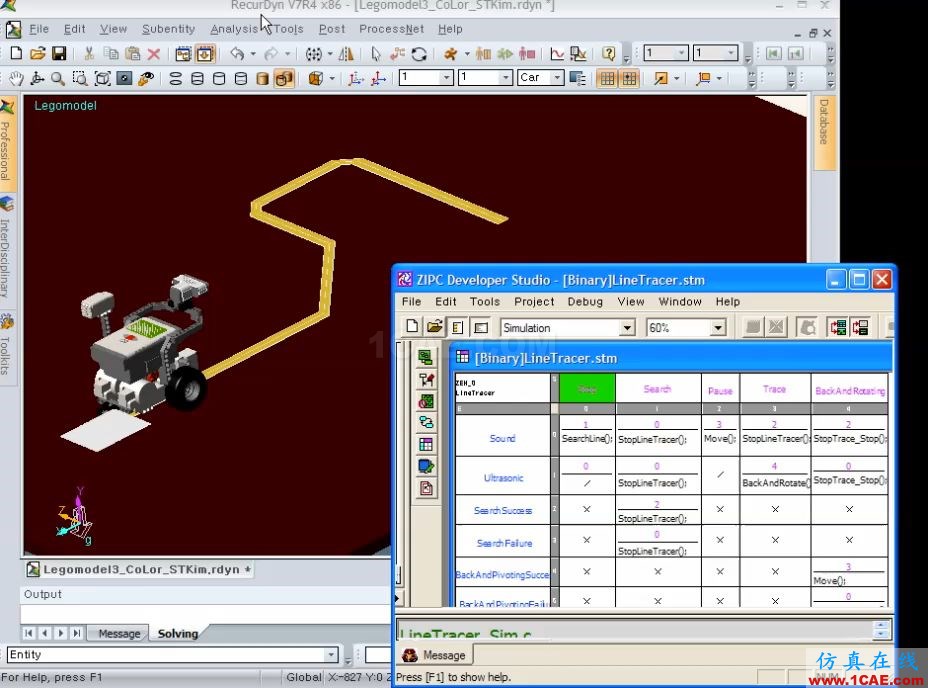
(5)验证机器人的驱动方式和控制逻辑
数字样机技术可以通过仿真验证机器人在驱动方式的动作行为:
-
电动机驱动
-
液压
-
气动
相关标签搜索:行业应用 | 机器人及数控机床研发中的仿真技术应用 Ansys有限元培训 Ansys workbench培训 ansys视频教程 ansys workbench教程 ansys APDL经典教程 ansys资料下载 ansys技术咨询 ansys基础知识 ansys代做 Fluent、CFX流体分析 HFSS电磁分析 Abaqus培训




