
Solid Edge及其二次开发技术在机器人设计中的应用
2013-05-23 by:广州有限元分析、培训中心-1CAE.COM 来源:仿真在线
孙一兰 柳洪义 李丽娜 来源:万方数据
关键字: 机器人设计 Solid Edge 二次开发 三维图形仿真
在研究当前机器人设计的基础上.结合三维图形仿真技术、参数化设计思想和Active X技术,将Solid Edge三维GAD软件及其二次开发技术应用于三维实体建模及机器人运动仿真、离线示教、在线观测等机器人设计的各个环节中。并以筒壁打磨机器人的设计为例,演示其实现方法与结果。
0前言
机器人设计是一门集中了机械工程、机器人运动学与动力学分析、计算机技术、自动控制理论等多学科领域的综合性技术,而Solid Edge(以下简称SE)具有丰富的功能模块及其强大的二次开发功能,可应用于三维实体建模及机器人运动仿真、离线示教、在线观测等机器人设计的各个环节中。这不但简化了机器人本体的设计工作,更为机器人的仿真和实验提供了一个平台。
1机器人的体系结构和SE在其中的应用
1.1机器人的体系结构
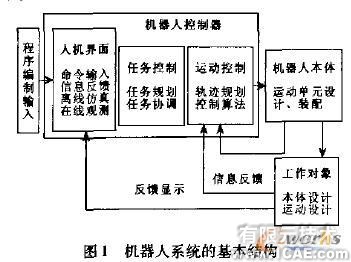
国际标准化组织(LS)定义:"机器人是一种自动的、位置可控的、具有多个轴的多功能操作机,能够借助可编程操作来处理各种材料、零件、工具和专用装置,以执行各种任务"。因此,机器人主要由机器人本体、控制器和软件三大部分组成,其基本结构如图l所示。
1.2 SE及其二次开发功能
SE是美国EDS公司推出的一款具有完整API接口的三维CAD软件,利用微软公司的Active X Automation技术.可采用多种开发工具如C、C++、Visual Basic等对其进行二次开发,得到功能更为强大使用更为简便的应用软件。例如SE自带的简单运动仿真模块和Dynamic Designer/Motion for SE模块,前者功能不够完善,而后者需要单独购买且使用复杂,通过二次开发,可以直接把用户的路径规划程序作为SE中三维模型的约束条件,实现机器人运动仿真、离线示教、在线观测等功能。
1.3 SE及其二次开发功能在机器人设计中的应用
针对机器人系统的结构和设计中存在的问题,主要用到三维建模、仿真与优化、离线示教、在线观测等4个SE功能模块及其二次开发功能,如图2所示。
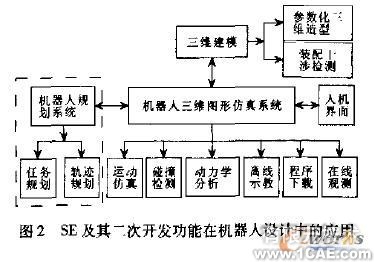
其中,任务规划和轨迹规划,虽不属于SE应用,但其仿真和优化过程都是在SE及其二次开发环境中进行。
2应用实例
现以一种筒壁打磨机器人为例,说明具体的实现方法和结果。
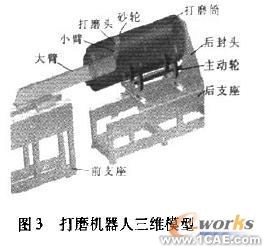
2.1筒壁打磨机器人的实体建模
图3所示为应用SE的Part和Assembly模块制作的打磨机器人模型。
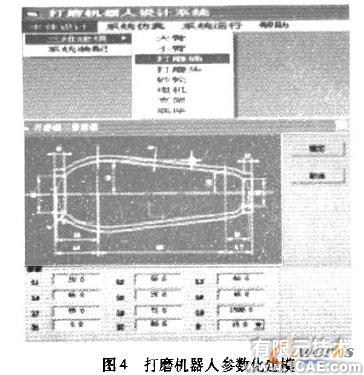
为了便于在设计中进行修改,采用了参数化设计思想,在VB环境中编写应用程序,驱动Part模块中的变量表来修改零件模块尺寸,并形成零件库,减少了大量重复性设计,其操作界面如图4所示。
2.2筒壁打磨机器人运动仿真
机器人运动仿真是指机器人真正执行操作之前,以动态三维图形直观地显示各单元的运动,以检测整个作业过程,进行结构和运动学分析,优化规划结果,离线示教和在线观截。这些可以很好地由S}二次开发功能实现,即利用Active X Automation技术,由VB环境中开发的客户程序(Client)驱动SE服务程序( Server),将用户规划的机器人各关节运动坐标作为约束条件,通过SE与VB的接口函数,驱动三维模型中的各运动单元进行仿真。操作者可以根据不同型号的打磨筒,设置直筒和圆筒段打磨速度和规划方法,并显示各关节轨迹规划结果。图5所示为打磨02型号筒壁时,各运动单元的轨迹规划结果。

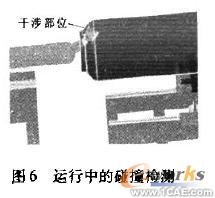
客户程序中用到Get Transform,Put Transform、Check Interference 3个接口函数,其功能分别是:(1)获取机器人各关节当前位置和位姿值;(2)按规划数据赋予各关节下一时刻位置和位姿值;规划数据或示教点数据通过这2个函数驱动SE中的三维模型仿真。(3)仿真过程中进行碰撞检侧,显示并记录碰撞零件、位置等数据,如图6所示。
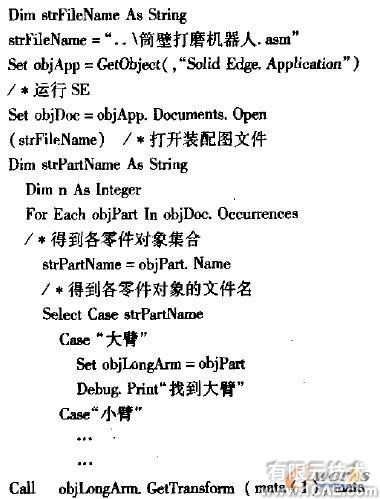
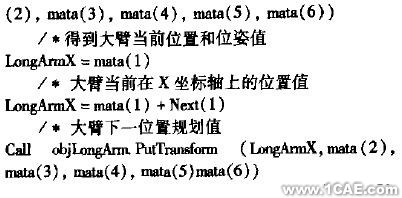
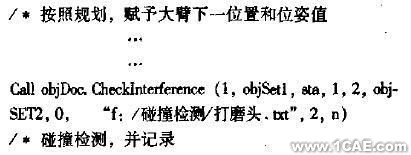
下面是Client中的主要程序段:
3总结
SE功能模块及其二次开发技术应用于机器人设计中,既简化了传统的本体设计方式,又增加了新的三维运动仿真和离线示教功能,模拟了实际工作情况,检测了规划的合理性、可行性。通过在筒壁打磨机器人设计中的应用,验证了SE及其二次开发功能对于机器人建模、规划、观测和提高设计效率都有着重要的意义。
相关标签搜索:Solid Edge及其二次开发技术在机器人设计中的应用 AutoCAD培训 AutoCAD培训课程 AutoCAD图纸设计 AutoCAD在线视频 AutoCAD技术学习教程 AutoCAD软件教程 AutoCAD资料下载 Fluent、CFX流体分析 HFSS电磁分析 Ansys培训 Abaqus培训 Autoform培训




