
UG NX5的渐开线标准齿廓啮合仿真
2013-05-18 by:广州有限元分析、培训中心-1CAE.COM 来源:仿真在线
戴春祥 徐国俊 来源:e-works
关键字:渐开线标准齿廓 参数化设计 啮合传动 运动仿真
在UG NX5环境下对通过参数化设计获得的渐开线标准直齿圆柱齿轮齿廓模型进行啮合装配,然后建立运动仿真模型,包括设置杆件、运动副及解算参数等,最后通过创建啮合线以及齿轮模型的啮合传动仿真分析,验证所建立的几何模型和运动模型的正确性及参数相关性。
1、前言
齿轮传动是最重要的机械传动形式之一,它可用于传递空间任意两轴之间的运动和动力,是现代机械中应用最广泛的一种传动机构,其特点是传动效率高、结构紧凑、工作可靠、寿命长等。齿轮机构常用的齿廓曲线有渐开线、圆弧曲线、摆线等,而在目前工程实际中,渐开线齿廓是最常用的一种齿廓曲线。
在一般的齿轮啮合仿真分析中,常常存在两个问题:一是没有通过正确的啮合装配就对齿轮副进行啮合仿真分析;二是在分析中没有利用渐开线标准齿轮的啮合线进行正确传动的验证分析。本文在UG NX5环境下对通过参数化设计获得的渐开线标准直齿圆柱齿轮齿廓模型,进行参数化啮合装配,然后建立运动仿真模型,包括设置杆件、运动副及解算参数等,最后通过创建啮合线以及齿轮模型的啮合传动仿真分析,验证所建立的几何模型和运动模型的正确性及参数相关性。
2、渐开线标准齿廓的啮合装配
通过UG NX5的参数化设计可以获得渐开线标准直齿圆柱齿轮齿廓模型。由机械原理课程可知,两个渐开线齿轮正确啮合的条件是它们的模数和压力角分别相等,而对于标准渐开线齿轮,国标规定压力角为20°,因此只要模数相等即可。
假设已经生成两个模数相同(m=4)齿数不同(Z1=25,Z2=35)的标准直齿圆柱齿轮模型,通过UG NX5的装配模块可将它们精确地啮合装配在一起。
为了确定齿轮的啮合位置,首先在齿轮模型中创建一个带键槽的中心孔,其中小齿轮的键槽方位由齿廓镜像线确定,大齿轮的键槽方位由齿槽镜像线确定,其草图位置及约束情况如图1所示。以下阐述两个齿轮模型的啮合装配方法。
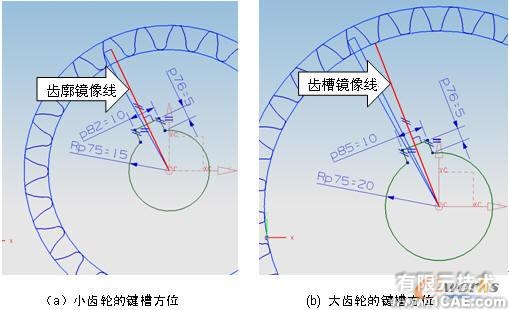
图1 创建带键槽的中心孔及其约束
通过装配模板新建一个装配文件。按装配约束先装配小齿轮模型(注意不是按绝对位置装配),层选项为原始层(Original),这样可保持主模型里层的设置不变。装配约束关系为:
--小齿轮模型空间里的基准Z轴与装配空间里的基准Z轴对齐;
--小齿轮模型空间里的齿廓镜像线与装配空间里的基准Y轴对齐,此装配约束的目的是让键槽处在垂直位置。
装配结果如图2所示,此时小齿轮模型在装配空间里是完全约束的。
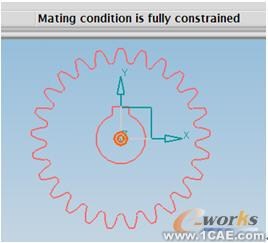
图2 小齿轮模型的装配结果
装配大齿轮模型的装配设置同上。其装配约束关系为:
--大齿轮模型空间里的节圆圆弧与小齿轮模型空间里的节圆圆弧相切;
--大齿轮模型空间里的XY基准平面与装配空间里的XY基准平面对齐;
--大齿轮模型空间里的齿槽镜像线与装配空间里的基准Y轴对齐。
装配结果如图3所示,此时大齿轮模型在装配空间里也是完全约束的。其中图3(a)所示为显示出了装配约束所需的节圆圆弧和齿廓、齿槽的镜像线,图3(b)所示为仅显示齿轮齿廓截面模型,图3(c)所示为两个齿轮齿廓装配后啮合处的放大视图。
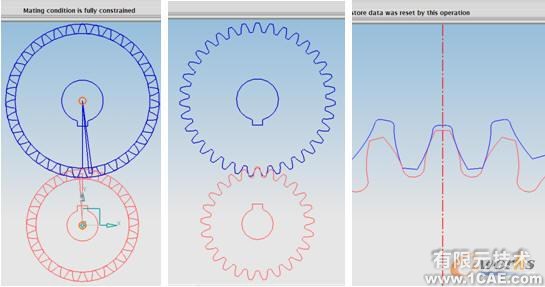
图3 两个齿轮模型的装配结果
至此,两个齿轮模型的啮合装配已经完成。
3、渐开线标准齿廓的啮合传动仿真
在UG NX5环境下建立一个运动学(Kinematics)仿真分析模型,如图4(a)所示。建立步骤如下:
--建立杆件(Link):分别选择两个齿轮的截面模型(齿廓和键槽孔)作为杆件;
--建立旋转运动副(Revolute):分别在两个齿轮截面模型的中心建立旋转运动副,并对大齿轮模型施加一个常数运动驱动(假设大齿轮为主动轮),其初始速度为(-30degree/second),负值表示齿轮运动与图示驱动符号相反;
--建立齿轮运动副(Gear):分别选择大齿轮和小齿轮的转动副,并输入传动比(Ratio)为1.4(传动比由齿数比确定:Z2/Z1=35/25=1.4)。
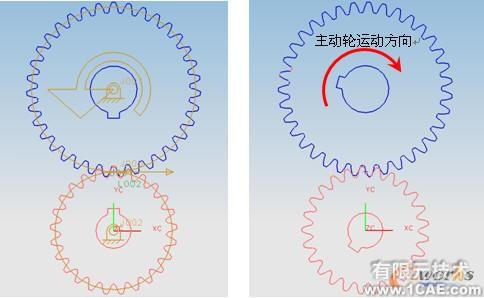
图4 建立并解算运动仿真模型
在建立运动仿真模型后,即可对其进行解算。解算参数设置如下:
--解算类型:选择常态运行(Normal Run);
--分析类型:选择运动学;
--时长(Time):由于主动轮的初始速度为30(度/秒),为了使主动轮能够旋转一周,选择时长为12(秒),即12秒×30度/秒 =360度;
--步数(Step):在速度和时长确定后,步数决定该时段内运动的快慢,为了详细观察齿廓啮合过程,选择步数为3600。
解算后即可对齿轮啮合传动进行运动仿真显示,如图4(b)所示为其中一幅运动截图。
为了说明标准渐开线齿廓的啮合过程,在齿轮装配模型里创建以下辅助线(如图5所示):
--通过WAVE Geometry Linker的方法分别拷贝两个齿轮的基圆和齿顶圆;
--作直线,分别与两个齿轮的基圆内切,该直线![]() 即为两个齿轮的理论啮合线;
即为两个齿轮的理论啮合线;
--分别过理论啮合线与两个齿轮齿顶圆的交点作直线,该直线![]() 即为两个齿轮的实际啮合线。
即为两个齿轮的实际啮合线。
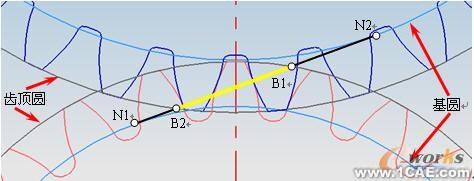
图5 标准渐开线齿轮啮合中的啮合线
在创建理论啮合线和实际啮合线后,继续对齿轮啮合传动进行运动仿真显示,就可以非常直观地看到两个齿轮在啮合线的B1点进入啮合(如图6(a)所示),在啮合线的B2点退出啮合(如图6(b)所示),所以称![]() 为实际啮合线。
为实际啮合线。
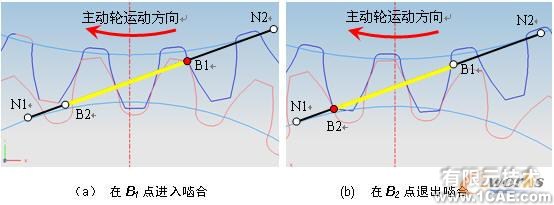
图6 观察两个齿轮的实际啮合过程
如果修改齿轮参数,例如将两个齿轮的齿数分别改为Z1=28,Z2=36,同样也可以进行啮合传动分析(注意此时的传动比为Z2/Z1=36/28),其分析结果与图6所示的结果相似。由此可以证明以上渐开线标准直齿圆柱齿轮齿廓的啮合装配是参数化相关的,同时也验证了渐开线标准齿轮齿廓模型及其运动模型的正确性。
4、结论
通过啮合装配获得了两个渐开线标准直齿圆柱齿轮齿廓的装配模型,通过啮合传动获得了两个渐开线标准直齿圆柱齿轮齿廓的运动仿真模型,运动分析结果表明,本文论述的渐开线标准直齿圆柱齿轮齿廓的啮合装配是参数化相关的,渐开线标准齿轮齿廓模型及其运动模型均是正确的。
相关标签搜索:UG NX5的渐开线标准齿廓啮合仿真 AutoCAD培训 AutoCAD培训课程 AutoCAD图纸设计 AutoCAD在线视频 AutoCAD技术学习教程 AutoCAD软件教程 AutoCAD资料下载 Fluent、CFX流体分析 HFSS电磁分析 Ansys培训 Abaqus培训 Autoform培训




