
空间光学镜头可适应边界温度的CAE计算方法
2013-06-18 by:广州有限元分析、培训中心-1CAE.COM 来源:仿真在线
空间光学遥感器在轨工作中承受严酷的空间热环境的考验,为了保证空间光学遥感器在外空间恶劣的温度环境下正常工作,提高空间光学遥感器的空间热环境适应能力,人们已经做了很多努力,也取得了一些成果,如从各个方面提高遥感器自身的成像能力、利用光学补偿的方法、选用热畸变更小的镜坯材料以及采用光学元件与支撑构件的线胀系数匹配等。这些方法在一定程度上增强了空间光学遥感器的热环境适应能力,降低了对空间遥感器热设计指标的要求,然而好的热控措施仍然是空间光学遥感器能顺利完成空间观测任务的必要保证。如何增强空间遥感器本身的温度环境适应能力,提出合理的结构设计,并在此基础上提出合理的热设计指标是做好空间光学遥感器热控设计的关键因素。在空间光学遥感器的设计阶段,设计人员往往保守地提出较高的热控指标要求,从而导致热设计难度增加,研制成本提高,可靠性降低。
本文提出了空间光学遥感器的热光学计算方法,并通过温度场描述和光机热集成的热光学计算,预示了光学遥感器对温度载荷的敏感程度,得出保证光学遥感器能够成像的合理温度范围,从而完成了遥感器从光学指标到温度指标的转换,合理地提出了光学遥感器的热设计指标,避免热设计的过设计或设计不足。
2 计算流程
利用计算机仿真手段,进行空间光学遥感器镜头可适应边界温度(将作为镜头热控设计的指标)计算,流程如图1所示。首先,对光学遥感器进行温度场载荷的设定;第二,计算在设定温度场作用下,光学遥感器热弹性变形的情况,并提取光学表面的变形参数进行波面拟合。第三,把光学表面的变形参数叠加到初始设计的理想光学系统,计算在热弹性变形的情况下是否能够满足光学遥感器的光学指标。通过以上3个步骤的反复迭代计算,最终得到可以满足光学成像指标要求的临界温度值,也就是理论上的热控指标。
3 温度场描述
温度场的描述方法是空间光学遥感器热控指标计算的关键问题。针对空间光学遥感器自身特点,对光学遥感器在轨工作可能存在的温度场状态进行描述,使计算分析设定的温度载荷工况能够全面覆盖在轨可能出现的温度场状态。根据轨道类型的不同,空间光学遥感器所受的温度载荷也不同,对热设计提出不同的要求。各种不同的温度载荷在仿真设计阶段要求都能给以充分的模拟,这就要求对空间光学遥感器可能经受的温度场情况进行充分的描述。
对于空间光学遥感器的温度场描述主要可从均匀温度水平和光学遥感器内部的温差两个方面进行。对于各种不同的光学系统,可以有不同的温度场描述方法,根据所取坐标参考的不同来进行。例如,对于轴对称的同轴系统,可以采用柱坐标。温差的描述主要从轴向、径向、周向三个方向进行,对于离轴的非圆周对称系统可以采用笛卡儿坐标,主要对三个坐标方向的温差描述。
确定光学遥感器的温度场描述方法后,就可以人为的进行温度场假定,进而探讨光学遥感器在各种温度载荷作用下的温度载荷适应能力。
本文探讨的光学遥感器的轨道采用太阳同步轨道,经受的空间温度载荷相对稳定;光学系统为如图2所示的卡塞格林光学系统;外形结构为圆柱形,反射镜位置及光路如图3所示。本文采用圆柱坐标系对可能存在的温度场进行描述,分别为均匀温度水平和沿轴向、周向、径向三个方向的温差,温度场描述设定如表1所示。

4 热光学计算
根据光学遥感器温度场的描述及设定的温度条件进行热光学计算。热光学计算是计算在给定的温度载荷作用下,由于结构的热弹性变形引起的光学表面的面形变化、几何位置变化及透镜折射率梯度的变化所引起的光学系统光程差的变化情况。对于反射系统,主要关心光学反射面的面形变化和几何位置变化。空间光学遥感器的热光学计算包括温度场计算、热弹性计算和光学计算3个主要步骤,光学系统成像优劣的一个重要指标是系统的光学传递函数MTF。本文光学遥感器镜头传函指标为![]()
4.1温度场计算
热光学计算的第一步是利用给定的温度边界条件,计算整个光学遥感器的温度场分布,在热的传递路径中考虑连接构件间的接触热阻、热辐射藕合等因素。以设定的温度载荷作为边界,计算整个光学遥感器的整机温度场分布。本文采用TMG软件作为温度场分布的计算工具。
4.2热弹性计算
热光学计算的第二步是热弹性计算,第一步计算得到的温度场分布作为本步的边界条件,作为温度载荷施加到遥感器,计算在该温度场作用下遥感器的热弹性变形情况,得到光学表面面形以及光学元件间相对位置变化,进而转换为光学计算的输人条件,进行光学性能评价计算。本文利用有限元分析软件(MSC. PATRAN/NASTRAN)建立有限元模型如图4所示,把TMG所计算的光学遥感器的温度场载荷转换为结构分析的温度载荷,利用分析软件NASTRAN进行遥感器光学镜头的热弹性变形计算,计算完成后处理得到光学遥感器光学系统各个光学表面节点的位移△X,△Y,△Z。各光学元件在温度载荷作用下的变形如图5所示。

4.3波面拟合
对热弹性变形结果进行光学表面提取,并进行波面拟合,利用n阶Zernike多项式(1)进行波面拟合,

人们对Zernike多项式的拟合方法做了很多研究,比较常用的方法有Gram-Schimidt正交化方法、协方差矩阵法、Householder变换法等。本文利用Householder变换法进行计算,各个光学表面处理的拟合精度均小于10 nm。
对热弹性变形的结果进行处理是基于对原有节点位置和热弹性变形的变形量的和,是系统发生热弹性变形后的新的光学表面的几何位置,波前差计算方法参照文献。
4.4光学计算
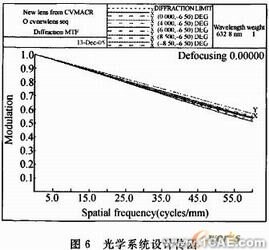
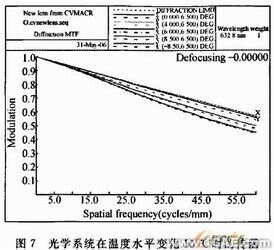
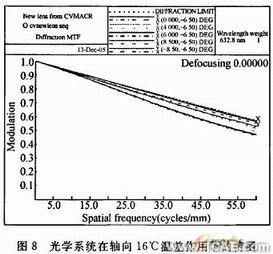
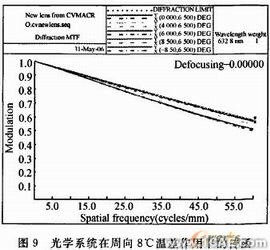
利用有限元计算,得到镜面的变形值后,计算光学系统各个镜面的波前差值,并通过拟合得到Zernike多项式系数,写成CODEV软件可以接收的接口文件(*.INT)格式,代入CODEV软件中,得到光学系统在发生热弹性变形条件下光学系统的调制传函(MTF)曲线。该光学系统设计传函如图6所示。通过迭代计算,最终得到满足光学指标要求的临界温度范围为水平变化l0℃、轴向温差16℃、周向温差8℃及径向温差5℃,所对应的光学系统传函分别如图7,8,9,10所示。
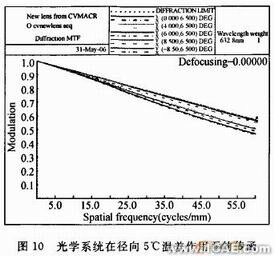
5 热控指标
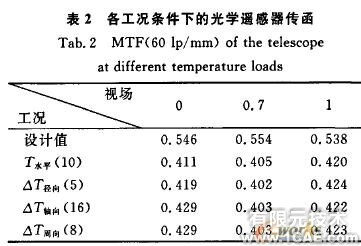
通过光机热集成的分析方法计算,得到的示例光学遥感器在临界温度的传函(60lp/mm)如表2所示,可以看出,整个光学遥感器温度适应范围为温度水平变化10℃时,达到了光学指标要求的临界值;而对于光学遥感器温度分布的适应范围为径向温差5℃、轴向温差16℃、以及周向温差8℃。可见本光学遥感器对径向温差最为敏感,对轴向温差不甚敏感。
根据热光学计算结果,得到整个光学遥感器的热控指标,山于地面光学装调温度为20℃,整个光学遥感器温度水平为10-30℃,X向温差不大于5℃, Y向温差不大于16℃,Z向温差不大于8℃。
6 结论
通过光、机、热集成热光学计算,为光学遥感器的热控指标的拟订提供了科学依据,解决了过去在方案设计阶段无法合理拟订热控指标的难题,避免了制定热控指标的盲目性。整个光机系统在温度载荷作用下,各个反射镜变形和位移具有相互补偿的可能性,简单地用光学误差分配的标准作为单个反射镜的热控指标,或为了安全起见,盲目地提出过高的热控指标都是不科学的。通过热光学计算,可以得出光学遥感器系统在热环境条件下的适应能力,并可以对光学遥感器在不同温度条件下的光学性能进行预示,从而可以对遥感器不同方向,不同部位的温度控制要求有一个详细的数据分析,能够有的放矢地提出对热控设计的要求,避免了指标的不合理造成热控设计的过设计或设计不足。在遥感器的方案设计阶段提出合理的热控设计指标,提高了设计效率,降低了设计风险,并可以为以后热光学试验提供数据参考。
相关标签搜索:空间光学镜头可适应边界温度的CAE计算方法 Fluent、CFX流体分析 HFSS电磁分析 Ansys培训 Abaqus培训 Autoform培训 有限元培训 Solidworks培训 UG模具培训 PROE培训 运动仿真




