
结构静力分析边界条件施加方法与技巧
2013-06-05 by:广州有限元分析、培训中心-1CAE.COM 来源:仿真在线
在结构的静力分析中载荷与约束的施加方案对计算结果有较大的影响,甚至导致计算结果不可信,笔者在《结构设计CAE主业务流程》的博文中也提到这一点。那么到底如何施加载荷与约束呢?归根到底要遵循一个原则——尽量还原结构在实际中的真实约束和受力情况。本文着重介绍几种约束的施加方法与技巧,并通过具体例子来进一步说明。
1 销轴约束
销轴连接在结构中是很常见的一种形式,其约束根据具体的结构形式有所不同,下面以一个走行装置为例具体介绍一下。
走行装置是连接平动轨道与上部结构的,其约束应是轨道通过车轮对走行装置的约束,但是通常对于车轮只要验证其轮压满足要求即可,因此在模型中往往将车轮简化掉,因此对于走行装置的约束就变为销轴约束。

图1 某走行装置
图1 中1-10是与车轮相连接的轴孔,车轮行驶于轨道上,约束位置在10对轴孔处,如果把整个轴孔都约束则约束刚度太大,结果会导致圆孔周围应力过大,因此应简化为约束轴孔中心点,将中心点与轴孔边缘通过刚性单元连接,简化为点约束。首先y方向(竖直向上)是应该约束的(此处假设车轮及轴为刚体),其次由于轨道与轮缘的相互作用,z方向(侧向)也应该是约束的,然后由于走行装置在向下的压力下会产生沿x方向(运行方向)的位移,因此x方向约束应放开,但是如果10对轴孔中心x方向的约束全放开则会导致约束不全无法计算,因此应在1轴孔或10轴孔中心处施加x方向的约束,这样实现全自由度约束。
2 转动轨道约束
图2是一个翻车机模型,该结构通过电机驱动,托辊支撑,2个端环在轨道上转动来实现翻卸功能。
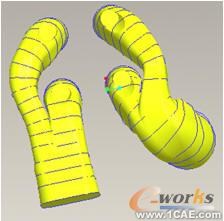
图2 翻车机
由于翻车机托辊支撑端环,由电机驱动不断地翻转卸车,造成其约束位置方向不断变化,针对一个具体翻转角度,翻车机端环在与托辊接触处(线接触)应约束沿翻车机端环径向,另外,由于翻车机在荷载作用下会产生沿翻车机轴向的位移,所以两端环中要约束一个端环的轴向自由度。
3 对称面约束
图3是某钢水罐模型,该模型关于y-z面对称,下面介绍一下该结构的约束处理。
图3 钢水罐
首先在1处由于受到钢水罐起吊装置的限制,其竖直方向y及水方向z无法变形,应施加z方向及y方向的约束,而x方向是没有约束的,此时因缺少约束无法计算,应注意到该结构(包括载荷与约束)关于y-z面对称,因此在y方向自重影响下其变形必关于y-z面对称,即y-z面与结构相交处x方向变形为0,因此可选择该相交处约束x方向(如图3中的2处),这样结构整体6个方向自由度全部约束,可进行计算。
总之,在实际分析中首先要将模型合理地简化,然后根据具体情况施加约束还原实际情况并满足计算条件。
相关标签搜索:结构静力分析边界条件施加方法与技巧 Fluent、CFX流体分析 HFSS电磁分析 Ansys培训 Abaqus培训 Autoform培训 有限元培训 Solidworks培训 UG模具培训 PROE培训 运动仿真




