
有限元分析及运动仿真在破碎机的应用
2013-06-07 by:广州有限元分析、培训中心-1CAE.COM 来源:仿真在线
为充分认识颚式破碎机的运动特性及结构安全性,采用SolidWorks建立了产品数字化模型。基于CosmosMotion与CosmosWorks仿真平台,通过运动载荷的传递,进行了运动学及结构有限元的协同计算。计算结果表明动颚应力大小随工作位置改变而变化。提出了动颚在最大载荷工况点的结构应力分布规律,为指导产品设计与改进提供了依据。
作者: 张珂*刘佳男*杨昌明 来源: 万方数据
关键字: 颚式破碎机 运动仿真 有限元
0前言
破碎机广泛应用于冶金、化工等行业,其中复摆 颚式破碎机因具有性能良好,生产率高等优点,所以 在中小型系列破碎机中占有较大比例,并有不断向 大型化发展的趋势。但机器振动、机重和摩擦等问 题仍较突出,能耗较高,合理选择工作参数和设计其结构参数,有利于节约能源。
从破碎机的现状来看,国内产品的机重高于国 外,而且颚式破碎机的设计目前仍偏重于经验方法。 随着计算方法与计算机技术的发展,在满足强度、刚 度以及安全性能的前提下,对动颚结构设计进行优 化,以减轻机重,是一个可行的解决方案。
1 复摆颚式破碎机机构模型
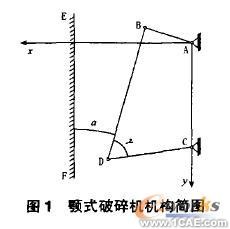
复摆颚式破碎机主要由偏心轴、动颚、肘板和机 架组成,属于典型的平面四杆机构,其机构如图1所 示。以曲柄转轴为原点,Y轴垂直向下、菇轴水平向左建立平面直角坐标系。在机构简图中AB为曲柄,CD为摇杆,在破碎机中分别对应偏心轴和肘板。BD为动颚,EF为定颚。BD与EF组成破碎腔,由动颚(连杆)往复摆动实现破碎机的功能。
2运动学仿真
首先采用SolidWorks完成整机数字样机设计,对破碎机三维装配模型作合理简化,保留机器工作装置部分。在此基础上采用Cosmos Motion进行运动学仿真,基于无缝集成接口Cosmos Motion对SolidWorks三维装配模型进行自动转化,建立运动学仿真模型,如图2所示。

在Cosmos Motion应用环境中,对装配模型施加约束。肘板座和轴承座定义为固定约束,动颚与偏心轴之间及肘板与肘板衬之间设置为旋转约束,以及其他部件约束如图2所示。对机构添加驱动力,选择带轮为主动件,定义属性:带轮为第1部件,肘板座为第2部件,约束类型是旋转副,绕z轴旋转,运动类型为速度,偏心轴的转速n=275 r/min。参照国产复摆颚式破碎机性能参数,选择相应电动机型号JO3-160M,额定功率15 kW,转速l 000 r/rain。在Intelli Motion浏览器的约束页面中,对偏心轴和动颚所构成的旋转副的属性进行定义,选择偏心轴的外表面及动颚的内表面为一对承载面,同时对肘板垫和动颚之间的约束做FEA定义,作为另外一组承载面。
为与实际工况相符,对动颚上表面添加载荷(破碎力反作用力),因而可以同时完成真实工况下运动机构所有零部件的运动学性能(位置、速度和加速度)和动力学性能(接点反作用力、惯性力和功率要求)等完整量化信息的计算。最后设定仿真参数,持续时间为1 s,帧数为50。在IntelliMotion.环境下完成运动模拟,得到了仿真结果(图略)。从动颚水平位移的仿真结果可以看出动颚的水平行程较大,这样有利于破碎物料。沿动颚运动轨迹的运动方向有促进排料作用,所以在一定的程度上可以保证破碎机的生产效率。从动颚竖直位移仿真结果中也可以看出垂直的行程较大,从而导致衬板磨损较快,降低衬板的使用寿命,故复摆颚式破碎机一般用于中小型机型。但随着耐磨材料的不断发展,衬板耐磨性的提高,这种机型也逐渐向大型化方向发展。动颚加速度X、y方向曲线表明,动颚在X、y方向上的加速度呈周期性变化。而且x、y方向的加速度不同步,X方向的加速度要比l,方向滞后180。左右,这样在整个周期内,机架都会受到较大的冲击,从而引起机器及其基础部件产生振动,使偏心轴回转不均匀,影响机构构件的强度,降低机器的可靠性,缩短机器的使用寿命。
3有限元分析
采用CosmosWorks软件,通过导入运动学仿真过程中的多个时间瞬间的运动载荷,进一步分析三维装配体中的零件在该时刻的受力状况,以便确定最坏工况点。选择装配体中的动颚为计算对象,进行多画面分析,分析每组具有关联的时间瞬间产生的运动载荷。
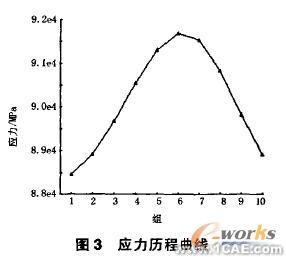
动颚材料为ZG35,弹性模量为2E+5 MPa,泊松比为0.3a单位设置为psi,设定结果为VON:vonMises应力。采用三维实体单元进行网格划分,同时考虑到动颚结构比较复杂,局部区域网格需进行加密处理。时间参数为1 s,设定为10组,完成计算后,结果分析如图3所示。
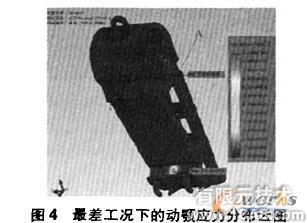
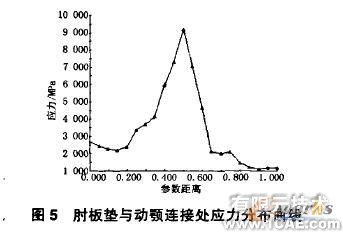
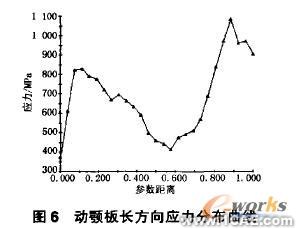
从图3可以看出最大应力值出现在第6组(t=0.58 s),表明一个周期内动颚在该时刻工况最差,对该工作位置的动颚进行详细的静态分析,应力分布云图如图4所示。图4中动颚肘板座附近应力最大,与实际情况相吻合,表明计算方法有效。在应力分布云图的基础上,进一步在肘板垫与动颚连接处以及沿动颚板长方向提取计算结果,分别见图5与图6。从2个图中可以发现局部结构区域出现应力集中现象,应力峰值甚至超过许用应力,如肘板座与动颚连接处。同时,动颚A点处(见图4)也存在一定程度的应力集中,且沿板长方向靠近肘板座处应力逐渐增加。
根据d Alambert原理,作用于动颚的惯性力与接点反作用力相互平衡。因此,当动颚工作位置随时间变化,对视为处于动态载荷的结构进行有限元分析,其最差工况下的计算结果往往大于静态分析结果。这种随时间变化的应力突变对结构安全的危害,需在设计中加以充分重视。所以除了对重要的零部件做静态有限元分析,还要进行动态仿真计算,以找出最差工况下的最大应力值,以及所在的位置,从而进一步在结构上进行优化设计。如可以对应力较大的地方进行结构上的再设计,保证工作中的安全系数达到许用值;在应力最低的地方,安全余量可能过大,则可以进行优化设计,以达到减小机重的目的。
4结语
针对复摆颚式破碎机这一典型传统产品,综合应用SolidWorks、CosmosMotion及CosmosWorks等现代设计与分析工具,实现了机构运动学与零部件有限元分析的集成仿真计算,得到了与实际相符的计算结果。数据表明,动颚在往复摆动的周期内,应力大小随工作位置改变而变化。
通过运动学模拟,确定了动颚最大载荷发生的时刻,并对该工况点进行了详细的有限元分析计算,发现了动颚局部结构区域出现应力集中的现象,同时揭示了结构应力的分布规律,从而为产品设计与改进提供了依据,并提出了进一步优化分析的设想。
相关标签搜索:有限元分析及运动仿真在破碎机的应用 Fluent、CFX流体分析 HFSS电磁分析 Ansys培训 Abaqus培训 Autoform培训 有限元培训 Solidworks培训 UG模具培训 PROE培训 运动仿真




