
基于MATLAB的滚珠丝杠动力学建模与仿真分析
2013-06-16 by:广州有限元分析、培训中心-1CAE.COM 来源:仿真在线
在数控机床中滚珠丝杠作为进给机构的传动部件,具有高效率、高精度、低摩擦和可逆性的特点,滚珠丝杠的运动特性将代表数控机床进给机构的运动特性。因为滚珠丝杠副具有传动和定位在同一个零件上实现,并且可以把旋转的角位移转化成线位移等特点,所以它的应用十分广泛:如在航空机械、数控机床、精密仪器和仪表,以及各种精密机械设备中,滚珠丝杠转动副是确定线性位移精度的最关键部件之一。但由于滚珠丝杠在实际中经常是细长且支撑跨度较大,因而传动刚度低,在一定程度上极大的影响了数控机床的性能及工件的加工精度图;加之精密光栅尺、磁尺和感应同步器等先进精密检测元器件的广泛应用以及自动检测技术的发展,滚珠丝杠副的设计制造及其性能也需相应的提高。目前滚珠丝杠的高速化和高定位精度是其发展的趋势,同时不可避免的又面临新的问题:如滚珠丝杠高速回转温度的升高和热位移的增大、滚珠循环系统的强度问题、噪声与振动、定位精度变化问题和预压力变化等。为了提高数控机床及精密机械的定位精度和传动精度,除了正确设计、选择进给系统的各个部件,精确计算其强度、稳定性和驱动力矩外,还要,对精密滚珠丝杠副在承受载荷下的刚度进行验算,以确保其安全、可靠、稳定工作。因此对滚珠丝杠的特性研究,将有利于数控机床精度和加工精度的提高,也可以改善滚珠丝杠的寿命。
2 建立滚珠丝杠的动力学模型
2.1 工作台各部件的连接及运动关系
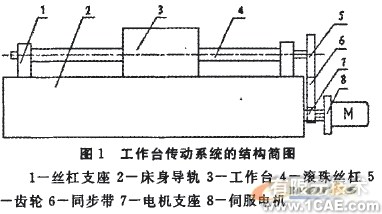
如图1所示的工作台传动系统的结构简图,伺服电机8通过电机支座7固定在床身的一端,滚珠丝杠4通过两个丝杠支座固定在床身上,丝杠螺母固定在工作台的低面上。伺服电机8通过同步带6和齿轮5驱动滚珠丝杠4旋转运动,工作台3通过滚珠丝杠与螺母副4的旋转来直线往复运动,实现工件在x轴方向的直线运动。
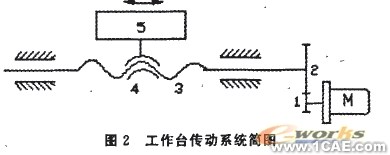
工作台传动系统的示意简图如下图2所示。工作台5通过螺母4和滚珠丝杠3组成的丝杠螺母副的旋转运动来实现其直线往复运动。丝杠3通过电机1和齿轮2的啮合来实现其旋转运动。效率高,传动灵敏,不易产生爬行;定位精度高;磨损小、寿命长、精度保持好等特点;有可逆性;给予适当的预紧,可以消除滚珠丝杠和螺母螺纹之间的间隙。②缺点:不能自锁,用于升降传动时需要另加自锁机构;制造工艺复杂,成本高。
选择滚珠 丝杠时一般满足以下条件:①滚珠丝杠的安装方式,②滚珠丝杠的最小底径尺寸;③允许的转速;④管珠丝杠的寿命;⑤滚珠丝杠系统的刚度,⑥驱动电机的选择。
2.2 建立工作台传动系统的动力学模型
因为工作台与导轨之间是有润滑,就存在粘性阻力,工作台和导轨的摩擦可以简化为一个阻尼器,丝杠可以简化为具有扭转刚度的弹簧,所以建立工作台进给系统的动力学方程如下所示。
①根据达朗贝尔原理,建立滚珠丝杠的动力学关系式,从而得滚珠丝杠2上受到的力矩式为:

式中:J:为齿轮2和丝杠的转动惯量,kg m2,
T为丝杠上的扭矩,N m,
c为阻尼系数;
h为滚珠丝杠的导程,mm;
m为滑枕量,kg;
x(t)为工作台的位移,mm。
②根据力矩平衡原理,将滚珠丝杠上的扭矩转换到电机轴上,于是得到电机轴上的平衡力矩为:

式中: θ(t)为电机的转角,rad;
K为滚珠丝杠的扭转刚度,N/m,
J1J2分别为电机、齿轮2的转动惯量,kg m2;
Z1 Z2及分别为电机 齿轮1、齿轮2的齿数。
③滚珠丝杠的扭转刚度为:
![]()
式中:1是从丝杠一端部到螺母中央之间的距离,且螺母处于全行程中距离丝杠此端最远的距离,cm,
d是丝杠公称直径,mm;
G是剪切模量,8.IX104'MPa.
④粘性阻尼系数c(kgf sec/mm)的确定
2.3 算例验证及仿真曲线图
本文以定梁龙门加工中心的工作台进给系统为例,采用其参数进行验证仿真分析。因为在X轴方向为工作台进给方向,在此方向的直线行程比起Y、2轴的方向上的直线行程距离大,相应滚珠丝杠的跨距也大,动力学特性相对于其它两个轴的滚珠丝杠的特性要差,因此有必要对其进行动力学仿真分析。
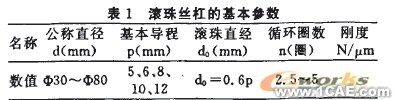
因为工作台的导轨是滑块导轨,承受的压力较大,导轨滑块所有的润滑油是属于黄油润滑,再根据表1得阻尼系数如下:
![]()
根据该数控机床所得参数如下:
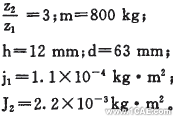
人以上参数到方程(1)、(2)、(3)中,运用MATLAB软件进行动力学仿真分析,所得仿真曲线图如下所示:
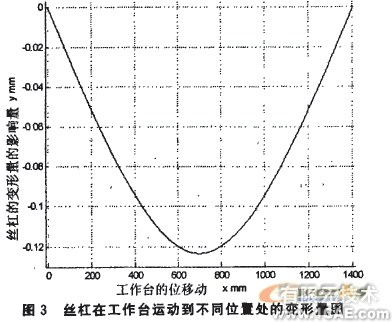
图3所示为滚珠丝杠在工作台运动到不同位置处时的变形量曲线图如下所示:
从图3可以看出,滚珠丝杠在两端的支撑支座上的弯曲变形量是零,由于两个支点的支持约束,使得滚珠丝杠在两个支撑点处没有发生弯曲变形。在中间处时,因为没有支撑并且距离支撑点的距离也是最大,因而滚珠丝杠的弯曲变形量最大。仿真的结果也符合实际情况,仿真的曲线图也就证明是正确的。
图4所示为滚珠丝杠在工作台运动到不同位置处时的振动曲线图如下所示:
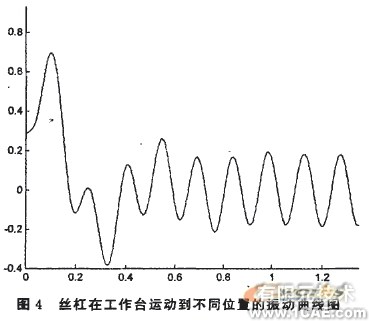
从图4可以看出,在滚珠丝杠开始的0~36Omm阶段里,它的振动幅度很大一0.39~+0.7lmm,表明刚开始时,伺服电机马上启动,而工作台没有随即跟随伺服电机的响应而马上启动,因而造成了冲击,迫使滚珠丝杠发生颤抖,因而就出现了振动。再往后,滚珠丝杠基本上跟随了伺服电机的响应,滚珠丝杠的颤抖就相对比较弱,因而振动也趋于平稳。但是由于滚珠丝杠本身存在制造的精度误差,以及刚度等的原因,振动不可能完全消除,只能在某一允许的误差范围内,表现出微小的、平稳的振动的。
3 结论
从仿真曲线图3和图4分析可以发现,当工作台运行到丝杠中点的位置时,丝杠的变形量最大,相应刚度相对较弱。如果增大床身导轨及工作台的刚度,这样工作台对滚珠丝杠因为弯曲而产生的压力减小,可以适当的提高一下滚珠丝杠的刚度;当工作台开始运动时,滚珠丝杠的振动相对较大,是由电机开始运转的冲击造成的,运动一段距离以后,基本没有冲击,滚珠丝杠的振动也就相对也比较平稳。所以,在工作台直线运动时,进给速度一定要保持基本均匀恒定,这样有利于滚珠丝杠的传动精度和寿命。
相关标签搜索:基于MATLAB的滚珠丝杠动力学建模与仿真分析 Fluent、CFX流体分析 HFSS电磁分析 Ansys培训 Abaqus培训 Autoform培训 有限元培训 Solidworks培训 UG模具培训 PROE培训 运动仿真




