
装载机工作装置的建模与仿真分析
2013-06-15 by:广州有限元分析、培训中心-1CAE.COM 来源:仿真在线
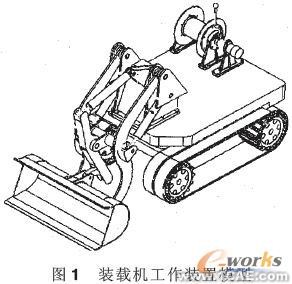
装载机是一种用途十分广泛的工程机械,它主要用于对散状物料进行铲装、运输、卸载及平整作业。若换装相应的工作装置,还可以进行推土、起重、装卸木料及钢管等作业。工作装置是装载机的重要组成部分,装载机的铲装、翻斗、提升、卸料都是通过工作装置的动作来实现的,装载机的工作装置是由铲斗、动臂和用来转动铲斗、升降动臂的转斗油缸和动臂油缸、连杆机构组成。
1 装载机工作装置的建模
装载机工作装置建模在proe中实现,利用proe零件实体,装配成装载机运动部件,ADAMS软件包提供了与proe的接口模块MECHANISM/Pro,它嵌入到proe中,利用它在proe环境中精确地定义刚体、运动副和载荷;然后将整个模型传送给ADAMS,在ADAMS中完成其他仿真参数的设定,产生装载机工作装置的模型(见图1),并进行运动/动力学仿真。
2 仿真分析
2.1 仿真过程的控制
反转六连杆装载机工作装置的典型工作过程可以分为以下4个阶段:(1)收斗过程;(2)举升过程;(3)卸料过程;(4)放平过程。可以用ADAMS中的STEP函数来实现装载机工作装置动力学仿真过程的控制。对应于工作过程的4个阶段,仿真过程的控制也分4个阶段进行。在仿真过程的每个阶段,模型的动作由加在构件上的传感器(Sensor)来限制,以保证动作准确到位。这4个阶段的动作控制要通过STEP函数来实现,下面针对工作装置的每一个动作阶段具体说明仿真过程。
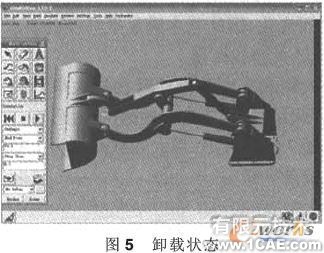
(1)转斗缸伸长,动臂缸闭锁,铲斗收斗,实现物料的铲装
a.为转斗缸添加运动,实现转斗缸伸长,铲斗收斗;
b.在转斗油缸上选择Jiont_c1, 圆柱副,右击选择弹出菜单中的Modify命令显示运动副修改对话框;
c.点选Impose Motion(s)...按钮,显示添加运动对话框;
d.选择运动类型为disp(time)=;
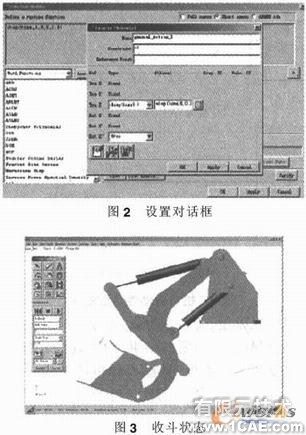
e.可以在文本框中输入所要添加的运动方程,也可以点选右边的按钮进入运动方程编辑对话框,在此使用运动方程编辑对话框,输入STEP函数如图2所示,完成运动添加;
f.为动臂缸添加运动,实现在转斗缸动作时,动臂缸自锁。其操作步骤同上,定义的运动方程为step(time,0,0,3,0);
g.进行3s,步长为0.01s的动态仿真分析,此阶段运行后的模型如图3所示。
(2)转斗缸闭锁,动臂缸伸长,动臂上举,实现物料的举升
a.为动臂缸添加运动,实现动臂的举升。操作步骤同上,定义的运动方程为step(time,0,0,3,0)+step(time,3.1,0,7,4.29);
b.为转斗缸添加运动,实现在动臂举升时,转斗缸自锁。添加的运动方程为step(time,0,0,3,2.5)+step(time,3,0,7,0);
c.进行运行时间为7s,步长为0.01s的仿真分析,在第2阶段运行后动臂、摇臂、铲斗所处的位置如图4所示。

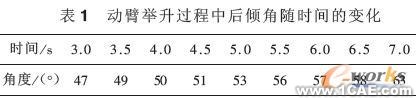
(3)转斗缸收缩,动臂缸闭锁,铲斗翻转,实现物料的卸载
a.为转斗缸添加运动,使转斗缸伸长,实现在转斗的翻转。添加的运动方程为step(time,0,0,3,2.5)+step(time,3,0,7,0)+step(time,7.1,0,10,-4.5);
b.为动臂缸添加运动,使转斗翻斗时动臂缸自锁,动臂在举升的位置保持不变。定义的运动方程为step(time,0,0,3,0)+step(time,3.1,0,7,4.29)+step(time,7.1,0,10,0);
c.进行运行时间为10s,步长为0.01s的运动学仿真分析,在第3阶段运行后动臂、摇臂、铲斗所处的位置如图5所示。
(4)转斗缸收缩,动臂缸收缩,动臂下降,铲斗自动放平,自动进入下一次铲掘状态
a.为动臂缸添加运动,动臂缸收缩,动臂下降,返回到初始状态。添加的运动方程为
step(time,0,0,3,0)+step(time,3.1,0,7,4.29)+step(time,7.1,0,10,0)+step(time,12,0,15,-4.29);
b.为转斗缸添加运动,动臂在下降过程中,转斗缸也收缩,铲斗自动放平,返回到初始挖掘状态。添加的运动方程为
step(time,0,0,3,2.5)+step(time,3,0,7,0)+step(time,7.1,0,10,-4.5)+step(time,12,0,15,2);
c.进行运行时间为15s,步长为0.01s的仿真分析,在第4阶段运行后动臂、摇臂、铲斗都回到初始位置,其状态如图6所示。

2.2 仿真分析
(1)平移性
装载机在运输位置时,铲斗底板与水平面间的夹角为铲斗的后倾角,一般推荐值为40~46°。为保证平移性,动臂在举升过程中,连杆机构应能使铲斗在收斗位置保持平移,使后倾角的变化量不大于15°。
从表1可以看出,在动臂举升过程中后倾角在47~63°间变化,因此基本满足平移性的要求。
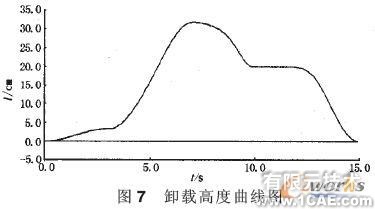
(2)最大卸载高度
最大卸载高度是指动臂在最大举升高度、铲斗成45°卸载角时,其斗尖离地面的高度。
从图7可以看出,最大卸载高度为1335m,基本达到设计需要。
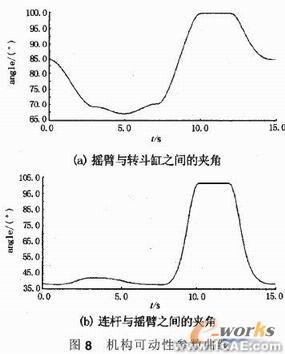
(3)传动性
连杆机构的传动性即保证各个工况不出现构件相互干涉,各机构的传动角不得小于°。
从图8可以看出机构间没有相互干涉的地方。由以上测量数据可以看出,工作装置的性能基本达到要求,仿真结果比较符合实际。
3 结语
本文利用ADAMS软件,建立了装载机工作装置虚拟样机模型,并且进行了动力学仿真。仿真效果良好,得到了所需要的结果,为装载机工作装置的设计提供了参考依据,是虚拟样机技术的一个良好应用实例,有很强的实用性,对于设计工作有一定的指导意义。
相关标签搜索:装载机工作装置的建模与仿真分析 Fluent、CFX流体分析 HFSS电磁分析 Ansys培训 Abaqus培训 Autoform培训 有限元培训 Solidworks培训 UG模具培训 PROE培训 运动仿真




