
Creo3.0 蜗轮蜗杆机构运动仿真!
2016-11-26 by:CAE仿真在线 来源:互联网
CREO3.0蜗轮蜗杆机构运动仿真
一.机构特点:
1.可以得到很大的传动比,比交错轴斜齿轮机构紧凑。
2.两轮啮合齿面间为线接触,其承载能力大大高于交错轴斜齿轮机构。
3.蜗杆传动相当于螺旋传动,为多齿啮合传动,故传动平稳、噪音很小。
4.具有自锁性。当蜗杆的导程角小于啮合轮齿间的当量摩擦角时,机构具有自锁性,可实现反向自锁,即只能由蜗杆带动蜗轮,而不能由蜗轮带动蜗杆。如在起重机械中使用的自锁蜗杆机构,其反向自锁性可起安全保护作用。
5.传动效率较低,磨损较严重。蜗轮蜗杆啮合传动时,啮合轮齿间的相对滑动速度大,故摩擦损耗大、效率低。另一方面,相对滑动速度大使齿面磨损严重、发热严重,为了散热和减小磨损,常采用价格较为昂贵的减摩性与抗磨性较好的材料及良好的润滑装置,因而成本较高。
6.蜗杆轴向力较大。
二.操作过程
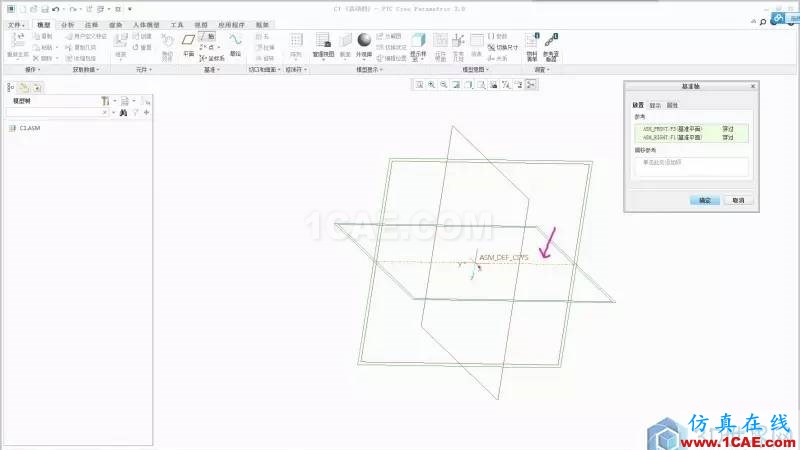
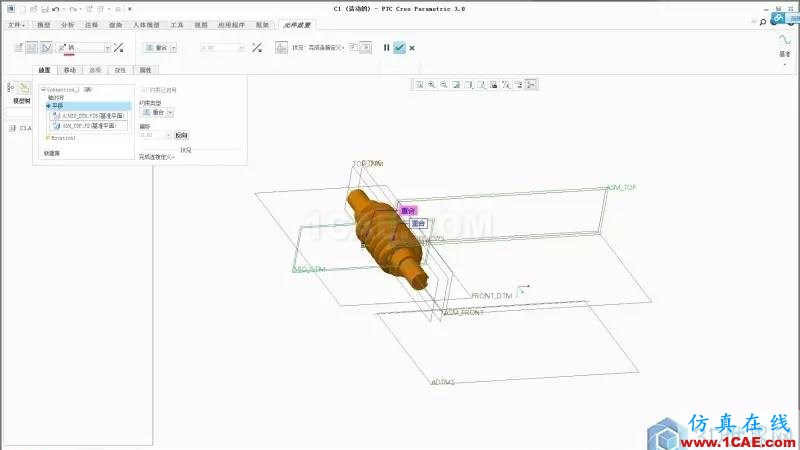
1.建立固定轴1
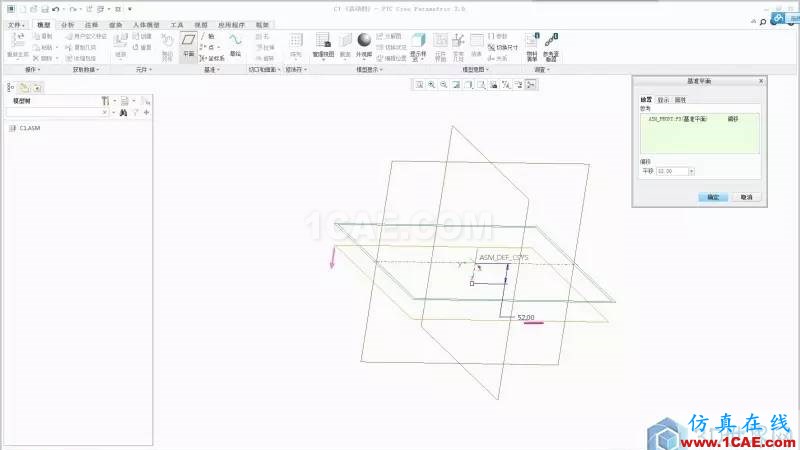
2.偏移面
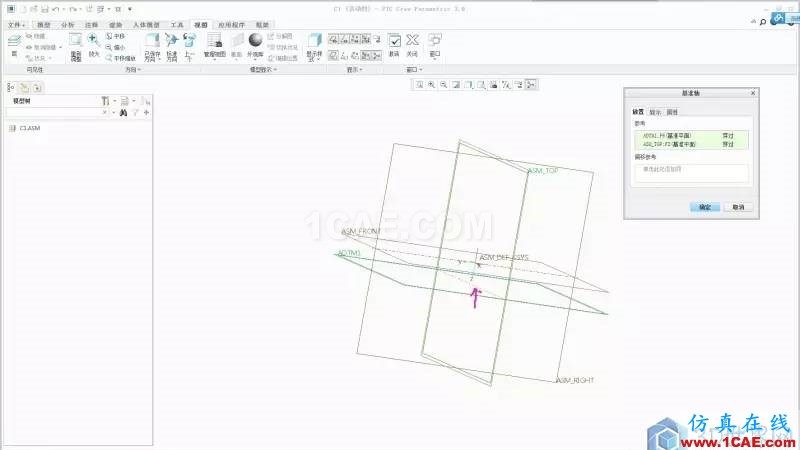
3.建立轴2
4.组装蜗杆
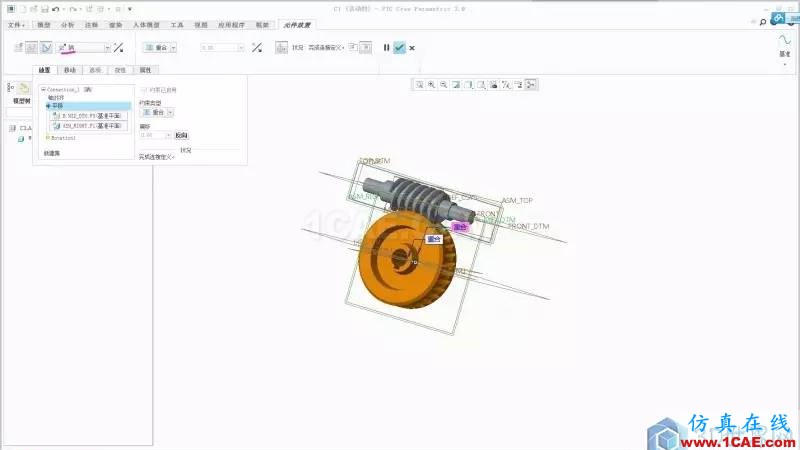
5.组装涡轮
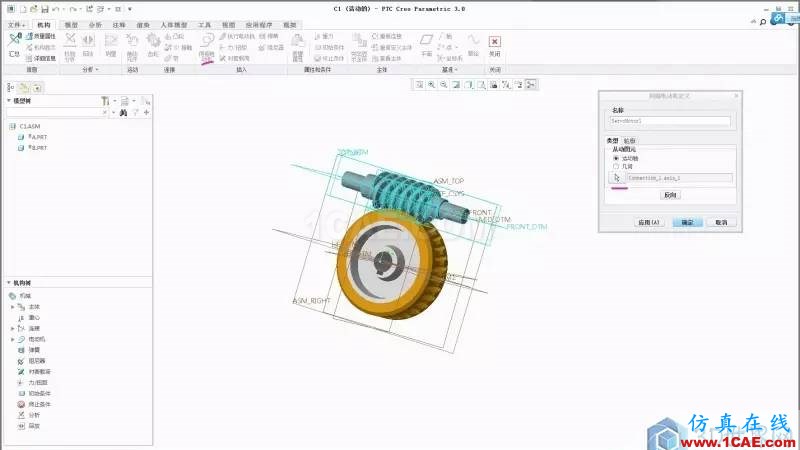
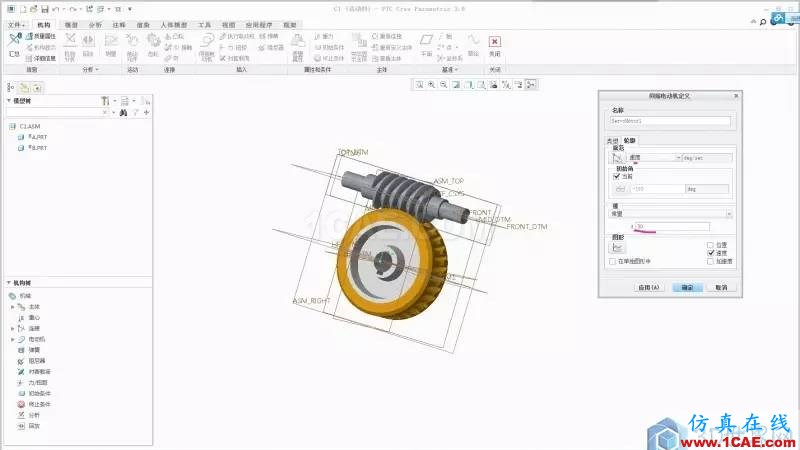
6.添加伺服电机、设置速度参数
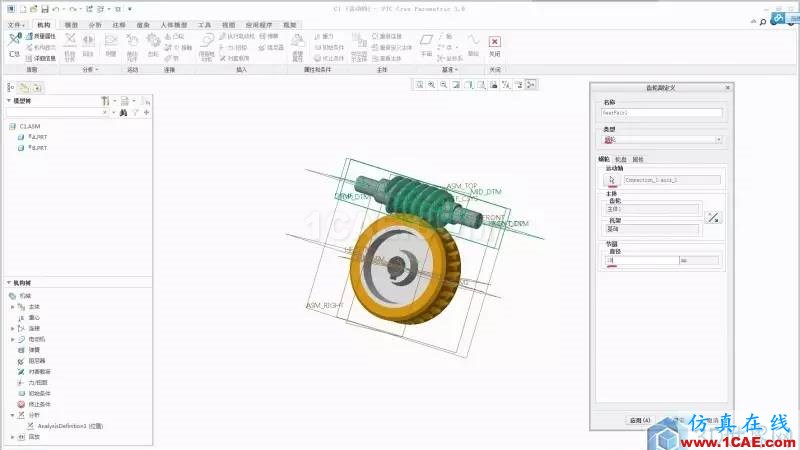
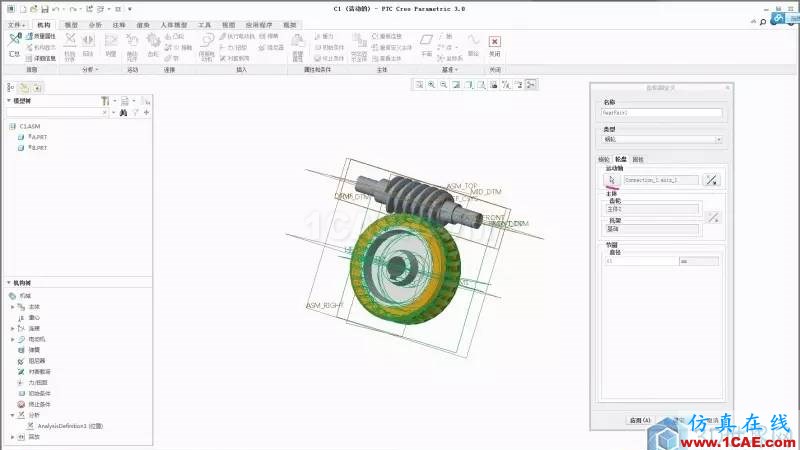
7.添加蜗轮蜗杆齿轮副
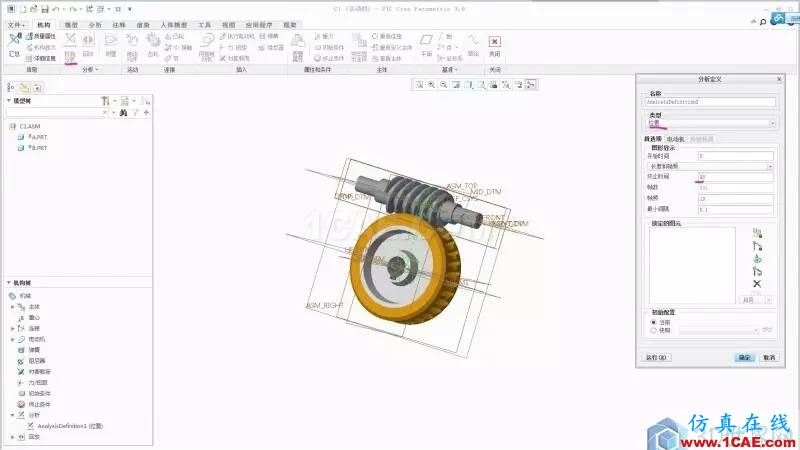
8.机构分析参数设置,运行
开放分享:优质有限元技术文章,助你自学成才
相关标签搜索:Creo3.0 蜗轮蜗杆机构运动仿真! Fluent、CFX流体分析 HFSS电磁分析 Ansys培训 Abaqus培训 Autoform培训 有限元培训 Solidworks培训 UG模具培训 PROE培训 运动仿真
编辑




