
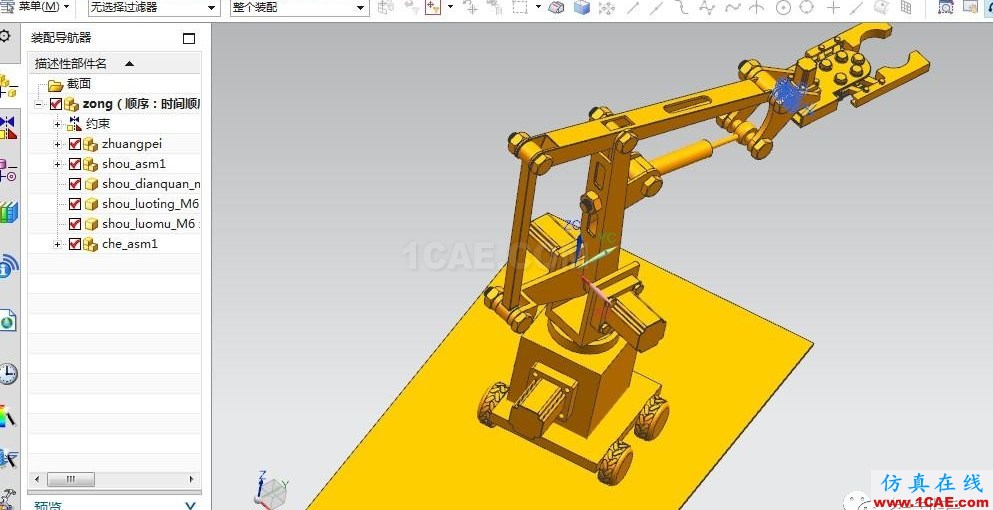
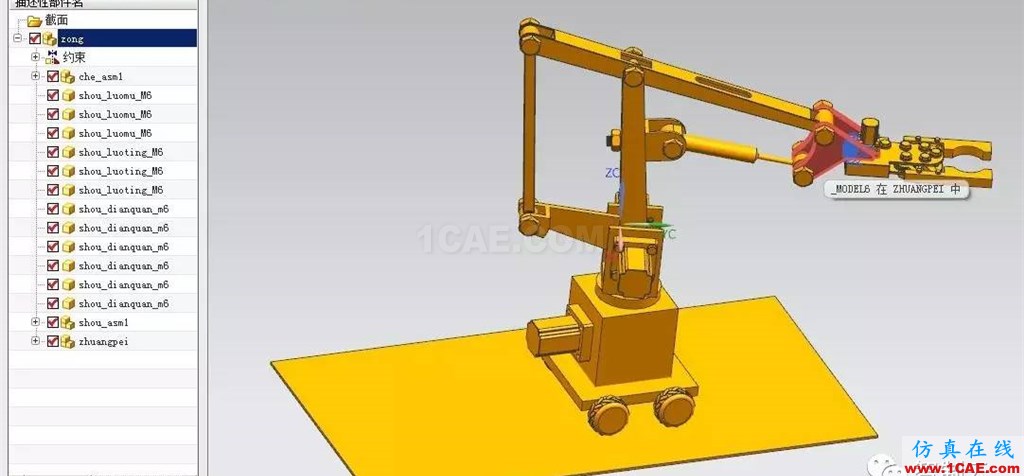
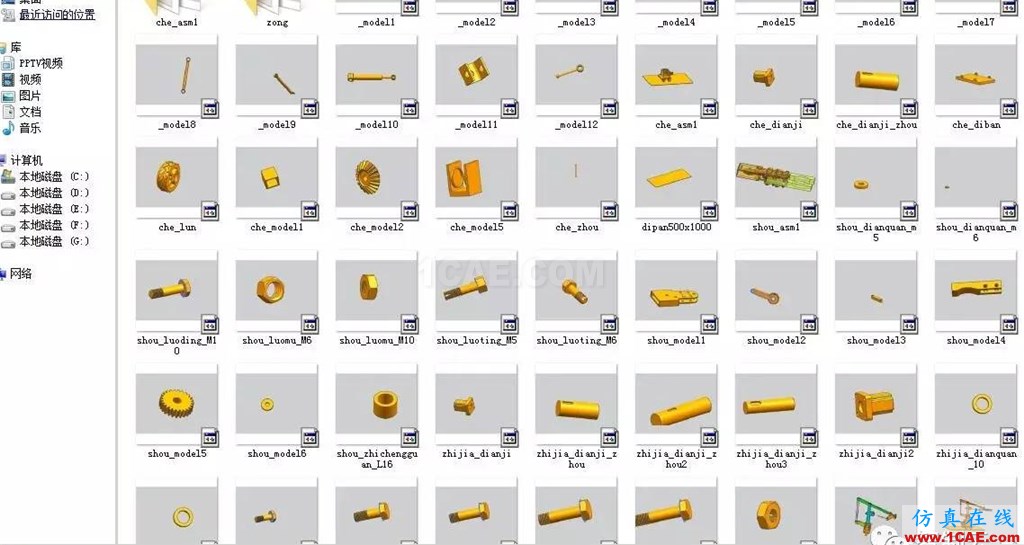
【机器人】多连杆机械手三维建模图纸(仿真源文件) UG8.5(NX)设计百度网盘下载
2017-01-02 by:CAE仿真在线 来源:互联网
文件大小:13.7MB
格式:UG8.5设计。
简介:运动及夹持部分设计较为详细,采用伞齿轮连杆夹持机构,连杆部分除伺服电机还增加了气缸辅助驱动。底部移动小车建模简单,主要用于建立仿真结构。有全套装配体仿真源文件,可直接进行分析并更改系统参数。



链接:http://pan.baidu.com/s/1nuH19eL 密码:p5p9
或
链接:http://pan.baidu.com/s/1pLk3EjD 密码:4nst
开放分享:优质有限元技术文章,助你自学成才
相关标签搜索:【机器人】多连杆机械手三维建模图纸(仿真源文件) UG8.5(NX)设计百度网盘下载 ug nx培训课程 UG培训 ug模具培训 ug视频教程 ug设计教程 ug软件下载 UG-autoform-dynaform仿真一体化 ug在模具建筑室内设计工业设计的应用 UG代做 UG基础知识 Fluent、CFX流体分析 HFSS电磁分析
编辑




