
ug-nx:想学好运动仿真?那有关运动副的理论知识可是关键!【转发】
2017-02-25 by:CAE仿真在线 来源:互联网
运动副简介:
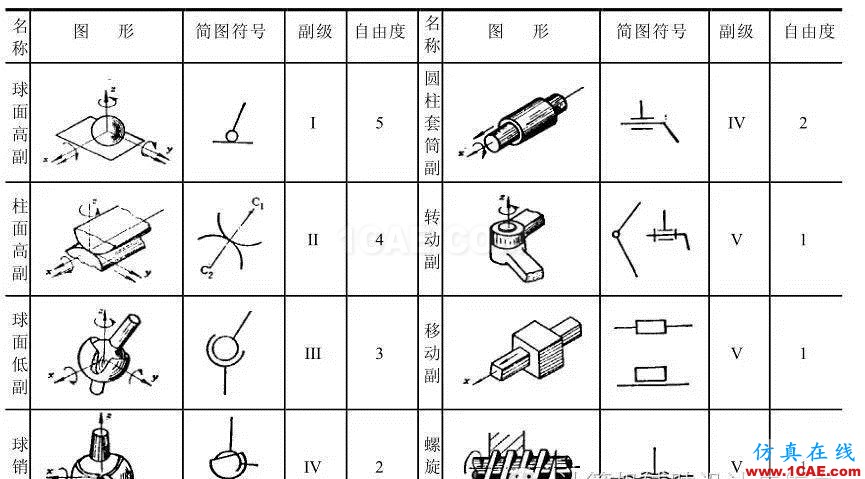
运动副是两构件直接接触并能产生相对运动的活动联接。按照运动副的接触形式分类:面和面接触的运动副在接触部分的压强较低,被称为低副,而点或线接触的运动副称为高副,高副比低副容易磨损。低副一般有转动副,移动副,螺旋副,高副有车轮与钢轨,凸轮与从动件,齿轮传动等。按照运动副引入的约束分类。可以分为圆柱副、平面与平面副、球面副、螺旋副等。机构中所有的运动副均为低副,称为低副机构;机构中至少有一个运动副是高副,称为高副机构。
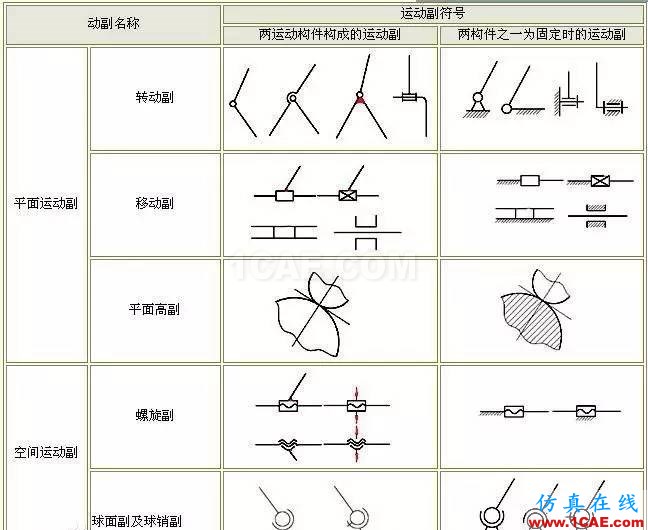
常用运动副介绍
旋转副
旋转副可以实现部件绕轴作旋转运动。它有两种形式:一种是两个连杆绕同一轴作相对的转动(咬合),另一种是一个连杆绕固定轴进行旋转(非咬合)。在旋转副一共被限制了5个自由度。
滑动副
滑动副可以连接两个部件,并保持接触和相对的滑动。在滑动到里面一共被限制了5个自由度,物体只能沿一个方向滑动。
平面高副
组成运动副的两构件能沿与接触平面平行的两个方向作独立的相对移动并绕与平面垂直的轴线作独立的相对转动的运动副。
螺旋副
螺旋副是零件相互运动的连接副。即相互运动为螺纹运动。代号为H。为空间V级低副,自由度为1。
球面副

组成运动副的两构件能绕一球心作三个独立的相对转动的运动副。
课外补充:
平面机构具有确定运动的条件:
机构自由度数 F≥1
原动件数目等于机构自由度数F
机构自由度一般计算公式
F=3n-2Pl-Ph(n –活动构件数;Pl –低副数;Ph –高副数)
机械原理小动画:


怎么样感觉很神奇吧,机械的世界就是这样充满色彩!
教程下载地址:http://pan.baidu.com/s/1hspzpGS
相关标签搜索:ug-nx:想学好运动仿真?那有关运动副的理论知识可是关键!【转发】 ug nx培训课程 UG培训 ug模具培训 ug视频教程 ug设计教程 ug软件下载 UG-autoform-dynaform仿真一体化 ug在模具建筑室内设计工业设计的应用 UG代做 UG基础知识 Fluent、CFX流体分析 HFSS电磁分析




